欧拉座屈分析
欧拉座屈的理论基础
什么是座屈
座屈是突然发生的,不像拉伸破坏那样逐渐的吗?我看铝罐被踩下时,突然就被压扁了,感到很好奇。
那个铝罐正是座屈的好例子。从上面缓慢按压罐子,到一定力的时候,罐子完好无损。但超过临界点,侧面会突然向外凸出,罐子瞬间崩塌。材料没有破裂,只是形状失去了稳定性 —— 这就是座屈。
材料完整无缺,但结构却崩坏了,这不危险吗?仅从应力计算是否能预测?
这恰好是座屈与拉伸的根本区别。拉伸的判断标准是"应力超过屈服点吗?",但座屈是几何稳定性的问题,应力可能远低于屈服点时就已发生。1757年,数学家欧拉(Leonhard Euler)首次用数学方法描述了这一现象。因此至今我们仍称之为"欧拉座屈"。
1757年?270多年前的理论如今仍在CAE中使用?
欧拉是当时数学的最高峰。他用变分法推导出"柱在什么荷载下失稳",这一公式成为今日CAE座屈固有值分析的出发点。我们先来推导这个方程。
支配方程的推导
欧拉公式是怎样推导的?
首先,考虑一根受轴向力 $P$ 的柱,它略微向横向弯曲。设弯曲量为 $y(x)$,则由此产生的附加弯矩为 $M = -Py$。代入欧拉·伯努利梁的弯曲方程:
$EI$ 是弯曲刚度吧。方程形式很简洁,但…
这是二阶线性常微分方程。令 $k^2 = P/(EI)$,则 $y'' + k^2 y = 0$。一般解为:
正弦和余弦!和简谐振动方程形式一样。
完全相同。现在应用边界条件。两端铰接($y(0) = 0$, $y(L) = 0$)时,得 $B = 0$,且 $A\sin(kL) = 0$。若要非零解($A \neq 0$):
$n = 1$ 对应最小荷载?实际结构就在这里座屈?
正确。代入 $k^2 = P/(EI)$,得最小临界荷载:
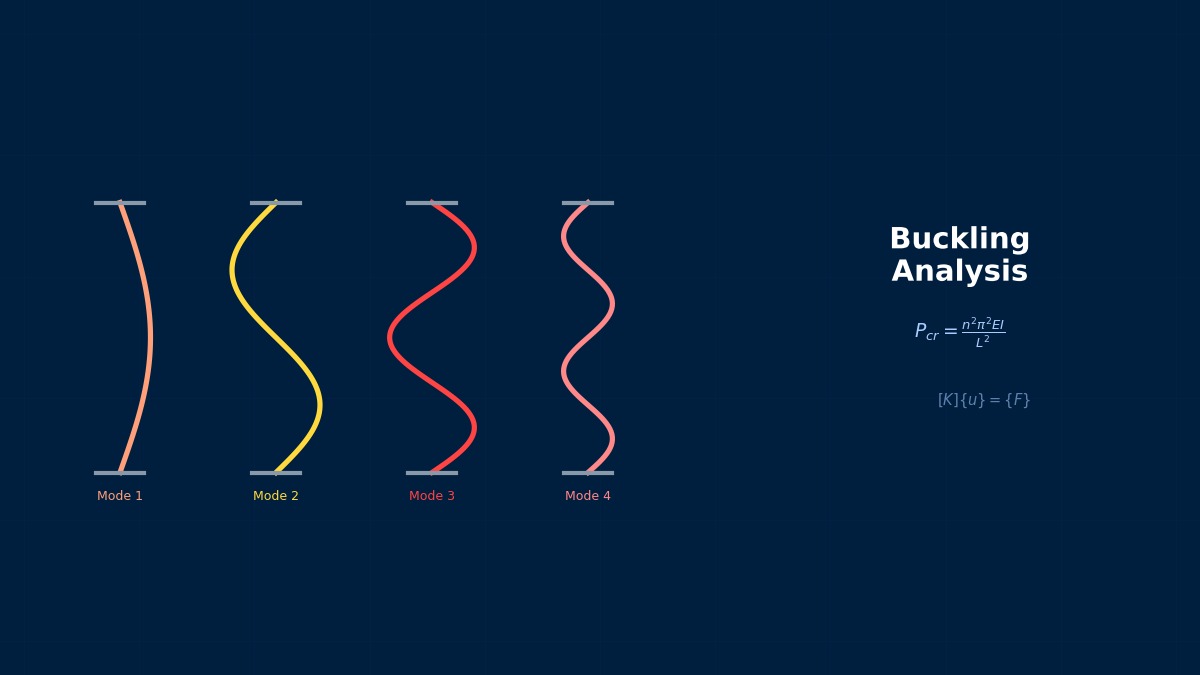
这就是著名的欧拉座屈荷载。$n = 2, 3, \ldots$ 是高阶模式,但实际结构通常由最低阶模式(正弦半波)支配。
边界条件与有效座屈长度
两端铰接的情况明白了。但实际柱子是否定在基础上,或连到楼板上呢?
这时引入有效座屈长度系数 $K$。它把实际边界条件下的座屈长度换算为"等效两端铰接柱的长度"。通用公式为:
| 边界条件 | K值 | $P_{cr}$ 的比例 | 实际例 |
|---|---|---|---|
| 两端铰接 | 1.0 | 1.0(基准) | 桁架部材理想化 |
| 一端固定·一端自由(悬臂) | 2.0 | 0.25 | 旗杆、自立柱 |
| 两端固定 | 0.5 | 4.0 | 混凝土墙间的柱 |
| 一端固定·一端铰接 | 0.7 | 2.04 | 钢结构框架的柱脚固定·梁连接 |
$K = 2.0$ 的悬臂,与同样长度的两端铰接相比,$P_{cr}$ 只有四分之一!差这么大吗?
因为 $P_{cr}$ 与 $(KL)^2$ 反比。悬臂柱的设计特别要注意。反之,两端固定时 $K = 0.5$,同一柱子的 $P_{cr}$ 就增大4倍。例如建筑钢铁柱,通过横梁或支撑降低端部的 $K$ —— 即提高座屈强度。
但现实的螺栓连接既不是"完全固定"也不是"完全铰接"吧?
敏锐观察。实际连接是"半刚性",$K$ 值偏离理论值。因此设计规范(AIJ、Eurocode 3)偏保守地取较大的 $K$ 值。CAE中可用旋转弹簧单元表现半刚性连接。低估这一点很危险。
细长比与适用范围
粗短的柱不会座屈吧?压缩时很难想象横向弯曲的样子。
这是欧拉公式的适用限界问题。改写成应力形式更清楚:
其中 $r = \sqrt{I/A}$ 是回转半径,$KL/r$ 称为细长比(slenderness ratio)。细长比越大,$\sigma_{cr}$ 越小 —— 即细长柱越易座屈。
反过来,超粗的柱(细长比很小),$\sigma_{cr}$ 会超过屈服应力,物理上可能吗?
这正是欧拉公式的适用边界。当 $\sigma_{cr} > \sigma_Y$(屈服应力)时,材料先屈服,座屈不会发生。欧拉公式有效的条件:
例如钢($E = 200$ GPa, $\sigma_Y = 250$ MPa),$KL/r > 89$ 左右。细长比更小的"中等柱"需用Johnson抛物线式或切线模量理论。
CAE座屈分析时,是否要意识到这种区分?
极其重要。线性座屈分析(固有值分析)基于欧拉型弹性座屈。对细长比小的部材只做线性座屈,结果会是危险的过估。这种情况应做非线性座屈分析(几何非线性+材料非线性)。
初期不整的影响
教科书的柱完全笔直,但工厂出的柱有微小弯曲。这对座屈有影响吗?
影响很大。实际柱必然有制造偏差、焊接残余应力、运输变形导致的初期不整(initial imperfection)。理想的完美柱在 $P_{cr}$ 之前保持直线;有初期不整的柱,随荷载增加逐渐弯曲增大。
设初期弯曲 $y_0 = a_0 \sin(\pi x / L)$,荷重 $P$ 下的弯曲为:
$P$ 接近 $P_{cr}$ 时,分母趋向零……弯曲发散!
是的。这叫不整敏感性。实际结构在达到 $P_{cr}$ 之前,就因过大的弯曲或屈服而崩坏。设计中引入安全系数,CAE中应进行导入初期不整的非线性分析。
具体如何导入初期不整?
两种典型方法:
- 座屈模式法 —— 线性座屈分析的一阶模态形状,以微小振幅(部材长 $L/1000$ 左右)缩放后赋予初始形状
- 设计规范法 —— 基于制造公差的不整模式(例:AIJ为 $L/1000$、Eurocode为 $L/500$)直接反映到形状
Abaqus只用 *IMPERFECTION 关键字就能将一阶模式直接作为初期不整,非常方便。
理论总结
我想整理一下到此为止的理论重点。
四个关键点:
- 座屈不是材料破坏,而是稳定性问题 —— 弹性范围内发生的几何不稳定现象
- $P_{cr} = \pi^2 EI / (KL)^2$ —— 边界条件($K$值)主宰座屈荷载
- 细长比决定适用范围 —— 短柱用欧拉式会危险地过估
- 初期不整大幅影响实际行为 —— 完美柱的理论值 $P_{cr}$ 不能盲目采用
座屈是"材料承不承"的问题,而是"形状稳不稳"的问题。只跟踪应力值会遗漏很多。
这个感觉很重要。座屈分析不只是出数值,更重要的是从物理上理解为什么这个结构会失稳。
欧拉的天才与座屈理论的诞生
1744年欧拉发表的座屈荷载公式 $P_{cr}=\pi^2 EI/(KL)^2$,曾令当时学者惊奇。"临界荷载与材料强度毫无关联,仅由截面形状($I$)和长度($L$)决定"这个结论,没人预想到。据传欧拉本人对这个公式的实用性也没十足把握,但270多年来,它一直是细长柱设计的基础。
欧拉座屈的数值计算方法
FEM座屈分析的定式化
欧拉理论明白了,FEM怎么解呢?和普通的 $[K]\{u\} = \{F\}$ 不一样?
根本不同。通常静力学只求解线性方程,座屈分析是特征值问题:
其中 $[K]$ 是通常的弹性刚度矩阵,$[K_\sigma]$ 是几何刚度矩阵(应力刚度矩阵),$\lambda$ 是座屈荷载系数,$\{\phi\}$ 是座屈模态形状。
特征值问题——我在振动分析里见过 $([K] - \omega^2 [M])\{\phi\} = \{0\}$ 这样的式子。形式很像…
数学上完全相同的结构。只是振动的质量矩阵 $[M]$,在座屈里换成几何刚度矩阵 $[K_\sigma]$。掌握这个对应关系,读求解器手册时理解速度会大幅提升。
$[K_\sigma]$ 是什么东西?从名字看和普通刚度矩阵不一样。
普通 $[K]$ 由材料弹性率和形状决定 —— 与荷载无关。而 $[K_\sigma]$ 取决于当前的应力状态。压缩应力存在时,$[K_\sigma]$ 的贡献为负,全体刚度向下降的方向起作用。
啊,我明白了!压缩荷载增加时,结构变"软",到某点整体刚度变为零 —— 那就是座屈点!
完美的理解。当 $[K] + \lambda [K_\sigma]$ 变为奇异(行列式为零)时,对应的 $\lambda$ 就是座屈荷载系数。参考荷载 $\{F_{ref}\}$ 乘以 $\lambda$ 得临界荷载。
几何刚度矩阵的构建
$[K_\sigma]$ 具体怎么算?
以梁单元为例。受轴力 $N$ 的梁单元的几何刚度矩阵为:
轴力 $N$ 直接出现在式子中,清晰表明了对应力状态的依赖。
那么座屈分析的步骤是先做静力分析求应力,再用那个应力构造 $[K_\sigma]$,然后解特征值问题?两个阶段?
完全正确。Nastran用SOL 105,Abaqus在Buckle步之前要Static步。遗漏前面的静力分析,$[K_\sigma]$ 就构造不了 —— 这是很常见的错误,要小心。
固有值求解器的选择
求解特征值的算法也有多种吗?
当然有。座屈分析常用的主要方法:
| 方法 | 特点 | 适用场景 |
|---|---|---|
| 逆幂迭代法 | 对最小特征值快速收敛 | 只需一阶模态时 |
| Lanczos法 | 大规模稀疏矩阵强。同时获得多个模态 | 实务中最标准 |
| 子空间迭代法 | 比Lanczos稳定但较慢 | 古老代码或特征值聚集 |
| Block Lanczos法 | Lanczos的并行化版本 | 大规模HPC环境 |
Lanczos法是标准的。需要求多少个模态?
绝对不能只求一阶。至少5~10个模态。理由两个:
- 模态聚集 —— 一阶和二阶特征值接近时,模态间相互作用会改变实际座屈行为
- 局部座屈的遗漏 —— 翼板局部座屈的特征值可能低于全局座屈,只看一阶会漏掉
线性座屈 vs. 非线性座屈
听说仅线性座屈分析还不够,什么时候要用非线性?
整理一下:
| 方法 | 求解 | 前提 | 得到 |
|---|---|---|---|
| 线性座屈(特征值分析) | $([K] + \lambda [K_\sigma])\{\phi\} = \{0\}$ | 微变形、弹性、无初期不整 | 座屈荷载系数 $\lambda$ 与模态形状 |
| 非线性座屈(Riks法等) | 荷载-位移平衡路径追踪 | 大变形、材料非线性、有初期不整 | 实际的崩坏荷载与后座屈行为 |
非线性更准确,为什么不直接用非线性?
计算成本差别巨大。线性座屈是一次特征值问题求解就完事。非线性是每个荷载增量内做平衡迭代。100倍以上的时间消耗很常见。
实务中的最优方法是:
- 先做线性座屈分析,把握座屈荷载和模态形状的大致情况
- 用一阶模态形状作初期不整,做非线性分析
- 非线性中采用弧长法(Riks法),追踪荷载的峰值(极限点),还可看后座屈路径
Riks法是什么原理?为什么普通Newton-Raphson不行?
Newton-Raphson以荷载为控制量,荷载-位移曲线的峰值(极限点)就过不去。Riks法以弧长为参数,荷载和位移同时变化:
这样可追踪荷载的反转(snap-through、snap-back)。看座屈后的行为时,Riks法是不可或缺的工具。
网格要求
座屈分析对网格有特殊要求吗?比普通静力分析更要细?
非常重要。要正确表现座屈模态形状,相对于座屈波长需要足够的网格密度:
- 座屈半波长每半波至少4~6个单元(二阶单元情况)
- 薄壳结构:板厚方向也要注意(固体单元至少2层)
- 局部座屈捕捉:翼板、腹板同样需细化
分析前不知道座屈半波长,网格怎么决定?
这就是实务的难处。先用粗网格跑线性座屈,看模态形状,然后对座屈变形集中的区域再细分,重新分析。网格收敛性的确认(粗、中、密三个水准的座屈荷载在2~3%以内)是必须的。
另一个要点:薄壳结构用壳单元比固体单元更高效更准确。固体单元模拟薄板时,剪切锁定导致刚度被高估,座屈荷载也会偏高。
记住细长比的目安
欧拉柱的细长比 $\lambda = KL/r$ 是安全性的第一个气压计。$\lambda > 120$ 是弹性座屈,$\lambda < 60$ 是材料屈服先发生。$\lambda = 60 \sim 120$ 的"中等柱"需用切线模量理论(Tangent Modulus Theory)。AISC钢结构设计手册规定 $\lambda_c = 4.71\sqrt{E/F_y}$ 作为弹性·弹塑性的分界。实务中看到柱子,试着心算一下细长比。
欧拉座屈的实务应用
座屈分析的实务流程
理论和数值方法明白了。实际做座屈分析时,第一步是什么?
座屈分析是"分析前的准备"决定胜负。整个流程是:
- 整理设计信息 —— 部材形状、材料、支持条件、荷载条件逐一确认
- 手算得到目安 —— 用欧拉式概算临界荷载。用来检验FEM结果的量级
- 确定建模方针 —— 单元类型、模型范围、能否用对称性
- 进行线性座屈分析 —— 确认座屈荷载系数和模态形状
- 必要时做非线性分析 —— 导入初期不整、用Riks法评估实际崩坏荷载
- 结果验证 —— 与手算比较、网格收敛性、模态形状合理性
第2步的"手算",既然有CAE为什么还要算?
FEM结果出问题时,对比对象不在就发现不了。比如两端铰接的钢柱($L = 3$ m、H形钢 H200×100),弱轴 $I_{min}$ 用:
FEM答案与这个数量级相差很大,就要怀疑输入错了。"先知道答案的大小"是铁律。
建模要点
柱的座屈用梁单元够吗?还是要壳或固体?
看情况而定。判断标准是:
| 建模方式 | 适合场景 | 注意事项 |
|---|---|---|
| 梁单元 | 断面一致、仅评价全局座屈 | 无法捕捉局部座屈(翼板波浪等) |
| 壳单元 | 薄壁开口截面(H形钢等)、板座屈 | 局部座屈自动出现。通用性最高 |
| 固体单元 | 厚壁部材、连接部详细评价 | 计算成本大,剪切锁定要注意 |
实务中先用梁建模把握全局,对感兴趣的部位用壳做子建模最有效率。
边界条件建模要注意什么?理论的"铰接""固定"和现实差异大。
这正是实务的痛点。螺栓连接是"半刚性",$K$ 值与理论不同。对应方法有:
- 保守方法 —— 固定度设低($K$ 设大),安全侧评价
- 旋转弹簧模型 —— 接合部加弹簧单元(旋转刚度),表现半刚性
- 详细模型 —— 接合部用固体单元+接触直接模拟(研究·验证用)
设计阶段用保守法,详细检讨时用旋转弹簧,是一般做法。
主要求解器的设置步骤
三大求解器(Nastran、Abaqus、Ansys)的具体设置教一下。
Nastran(SOL 105):
SOL 105
CEND
SPC = 1
LOAD = 1
METHOD = 10
BEGIN BULK
EIGRL, 10, , , 10 $ 求10个模态
...
ENDDATA关键是EIGRL卡片指定模态数。默认的1个模态远不够。
Abaqus(*BUCKLE):
*STEP
*BUCKLE
10, , , $ 求10个模态
*CLOAD
...
*END STEPBuckle步前面必须放Static步。非线性座屈改用 *STATIC, RIKS:
*STEP, NLGEOM=YES
*STATIC, RIKS
0.01, 1.0, 1e-8, 0.1Ansys Mechanical(APDL):
/SOLU
ANTYPE, STATIC
SOLVE
FINISH
/SOLU
ANTYPE, BUCKLE
BUCOPT, LANB, 10 ! Lanczos法10个模态
SOLVE
FINISHWorkbench里就是加"Eigenvalue Buckling"分析,链接到Static分析后面。GUI操作最方便。
结果的读法与验证
座屈分析跑完,最先看什么?
三个步骤验证:
1. 座屈荷载系数 $\lambda$ 的大小:
- $\lambda > 1.0$:参考荷载范围内不座屈(安全侧)
- $\lambda < 1.0$:参考荷载以下就座屈(需改设计)
- $\lambda$ 为负:拉伸侧座屈,通常忽略
2. 模态形状的确认:
- 是全局座屈还是局部座屈,从图形判断
- 拘束的效果是否正确反映在模态上
- 有无物理上不可能的变形模式
3. 与手算的对照:
- 欧拉式的概算与量级一致吗?(2倍以上差异是输入错误的信号)
$\lambda = 1.2$ 的话,"堪堪安全"可以吗?
不行。线性座屈的 $\lambda$ 是上限值,初期不整·残余应力影响下实际崩坏荷载会低很多。设计规范的安全系数(通常2.0~3.0)要用上。$\lambda = 1.2$ 判定为"设计可能不足"。
实务检查清单
每次座屈分析都要确认的检查清单:
- ☐ 事前用手算确认了座屈荷载的量级吗
- ☐ 座屈方向(强轴/弱轴)评价正确吗
- ☐ 求了足够多的模态(5~10个以上)吗
- ☐ 模态形状可视化确认了物理上的合理性吗
- ☐ 局部座屈模式没有遗漏吗
- ☐ 网格收敛性确认了吗(粗·中·密三水准)
- ☐ 边界条件的拘束度与实结构相符吗
- ☐ 细长比确认在欧拉公式的适用范围内吗
- ☐ 必要时进行了非线性分析(初期不整+Riks法)吗
- ☐ 设计规范的安全系数用上了吗
这份清单,想每次分析都贴在报告里。
很好的想法。座屈是"计算跑通"和"答案对"之间差距最大的领域。清单流于形式不行,每次逐项确认的习惯很重要。
东京晴空塔与座屈设计
东京晴空塔(634 m、2012年完成)的钢部材在地震·强风·自重的复合荷载下的座屈设计是最大课题。全钢部材的细长比严格管理,局部座屈排除为前提,板厚·宽厚比的选定严格执行。250 m以上的全柱部材用了弹塑性座屈评价,成为2000年改订的性能规定设计法的典范。
欧拉座屈的软件比较
商用工具的座屈功能
座屈分析是不是各种软件都能做?有专长不专长?
主要的汎用FEM求解器都能做线性座屈分析。但座屈特化功能的充实度差别很大。特别是非线性座屈(弧长法)和初期不整导入的易用性有显著区别。
Nastran的座屈分析
Nastran是座屈分析的元祖聞、実际的所?
Nastran是NASA在1960年代为宇宙结构的座屈评价开发的,座屈分析的原点就在这里。
| 求解器 | 用途 | 特点 |
|---|---|---|
| SOL 105 | 线性座屈 | 特征值分析。最基础。计算快 |
| SOL 106 | 非线性静力 | 大变形对应。PARAM,BUCKLE用弧长法座屈追踪 |
| SOL 400 | 高度非线性 | 接触·材料非线性与组合 |
Nastran最大的优点是大规模模型的稳定性。整车车身(数百万自由度)的座屈分析,Lanczos法也稳定动作。航空宇宙和汽车产业Nastran根深蒂固的原因就在这里。复合材料板(PCOMP)与座屈的组合评价,独领风骚。
Abaqus的座屈分析
Abaqus是非线性强,座屈也这样吗?
Abaqus在非线性座屈的易用性是业界顶级。
| 步类型 | 用途 | 特点 |
|---|---|---|
| *BUCKLE | 线性座屈 | Lanczos法或子空间法 |
| *STATIC, RIKS | 非线性座屈 | Modified Riks法。后座屈路径追踪的定番 |
| *STATIC, STABILIZE | 不稳定问题稳定化 | 人工粘性座屈通过稳定化 |
特别是 *IMPERFECTION 关键字一条就把线性座屈的模态形状直接作为初期不整导入。Nastran要DMAP费事。座屈论文中Abaqus多的原因,主要是Riks法和初期不整导入的完成度。
Ansys Mechanical的座屈分析
Ansys的立场是?Workbench用起来简单吧。
Ansys是座屈分析最低门槛的求解器。
| 分析类型 | 用途 | 特点 |
|---|---|---|
| Eigenvalue Buckling | 线性座屈 | Workbench从直观设置 |
| Static Structural(NLGEOM=ON) | 非线性座屈 | Arc-Length法选项 |
| 参数化分析 | 设计优化 | 截面参数和座屈荷载的关系自动评价 |
Workbench的强项是参数化座屈评价。"翼板厚10 mm~20 mm、1 mm刻座屈荷載変"自动跑。设计优化的機能非常効率的。
座屈分析的功能比较表
座屈分析絞3大求解器的比较表:
| 机能 | Nastran | Abaqus | Ansys |
|---|---|---|---|
| 线性座屈 | SOL 105 | *BUCKLE | Eigenvalue Buckling |
| 弧长法(Riks法) | SOL 106 + PARAM | *STATIC, RIKS | Arc-Length |
| 初期不整导入 | DMAP/外部工具 | *IMPERFECTION(简单) | UPGEOM(费事) |
| 后座屈人工稳定化 | 限定的 | *STABILIZE(优秀) | 稳定化有 |
| 大规模并列 | 非常强 | 强 | 强 |
| 参数化座屈 | 外部连携必要 | Python脚本 | Workbench GUI |
| 壳座屈的实績 | 航空宇宙圧倒 | 研究用途充实 | 一般産業広 |
结局,怎么选?
粗略来说:
- 航空宇宙·复合材料板座屈 → Nastran优先
- 后座屈详细评价·学术研究 → Abaqus的Riks法最易用
- 设计阶段的参数化评价 → Ansys Workbench高效
"万能全能"求解器无。关键是理解工具的限界,在此基础上使用。哪个求解器也,座屈物理不理解的工程师跑出来的答案,表面上对但实际错 —— 这种事很常见。
开源工具选项
大学研究室这样预算有限的地方,有能用的开源工具吗?
Code_Aster(法国电力公司EDF开发)有力。线性座屈·非线性座屈都对应,GUI用Salome-Meca。CalculiX Abaqus入力格式(.inp)互換、Abaqus模型的流用。
最大的注意:检验责任全部自分。商用工具NAFEM等检验、OSS自分基准测试比较信頼性确认必要。座屈结果的大分野、的检验軽視。
求解器选择的意外决定因素
座屈分析的求解器選定意外效「社内」。Zaha Hadid Architects社Dlubal RFEM/RSTAB使、曲線鉄骨柱(細长比 $\lambda > 180$)的Eurocode準拠座屈繰返验证型式証明取得。最前沿的建築、実績的工具手慣的組合最強好例。
欧拉座屈的故障排除
出现负特征值
线性座屈分析跑出来全是负特征值。是Bug吗?
不是Bug。负特征值表示与参考荷载反方向座屈。用压缩荷载输入了,却出现拉伸方向的座屈。
| 原因 | 情况 | 对策 |
|---|---|---|
| 荷载方向符号错 | 拉伸当做压缩输入 | 确认荷载方向(坐标轴正负)·修正 |
| 反力方向座屈 | 某部材的反力是压缩 | 只评价正特征值 |
| 模态数不足 | 正特征值埋在负值中 | 求解模态数增到20以上 |
求了10个模态全是负的,荷载方向完全反了的可能性很高。
座屈荷载与手算不符
手算 $P_{cr} = 293$ kN,FEM出450 kN。高了5成…。
FEM比手算高的情况,三个原因顺序确认:
1. 座屈方向对吗?
欧拉式用 $I_{min}$(最小惯性矩)。H形钢就是弱轴周边。FEM有没有强轴座屈出来、弱轴座屈没出来的情况?弱轴向位移被拘束了?模态形状必须看。
2. 边界条件拘束度对吗?
$K = 1.0$(两端铰接)的的、回転拘束 $K = 0.5$(両端固定)相当、$P_{cr}$ 4倍飞。
3. 单元类型合适吗?
梁单元没有翘曲自由度考虑,开截面(H形钢、槽形钢)的座屈荷载被过大評価。
反过来,FEM比手算低的场合?
这种情况局部座屈先发生的可能性大。欧拉式只评价全局座屈,壳或固体建模时翼板的局部座屈会先出现。模态形状是整体横曲还是局部波状,要確認。
非线性座屈不收敛
Riks法非线性座屈跑,在座屈点前面收敛不了。
非线性座屈最常見的困扰。原因三个:
原因1: 没导入初期不整
完全对称的结构对称荷载、数値的分岐点通過不可。小撹乱求解器直线平衡路径留。対策線形座屈的1次形状振幅 $L/1000$ 程度初期不整导入。
原因2: 増分幅大
座屈点付近荷重-変位曲线的勾配急変。Riks法初期弧長荷重的1%程度、最小増分小。Abaqus的例:0.01, 1.0, 1e-8, 0.1
原因3: 接触境界的急変
座屈大变形起接觸条件的状態急変収敛乱。境界条件極力单純化(理想·固定)収敛确认、段階的复雑化。
座屈模态依赖于网格
网格一改,座屈荷载和模态形状也跟着变。
网格收敛性的确认不可省:
- 粗网格分析 → 座屈荷载和上位5模态记录
- 网格细化2倍 → 同样确认
- 再细化2倍 → 同样確認
- 座屈荷载变化2~3%以内就可以
全体座屈是比较的网格钝感,但局部座屈(板的波状座屈等)非常敏感网格密度。特板的自由辺付近网格密度極敏感。粗网格局所座屈「見」状態、全体座屈荷重计算 ―― 结果座屈荷重过大評価危険。
求解器常见错误
各求解器见到的错误信息和对策教一下。
Nastran SOL 105:
| 错误 | 意思 | 对策 |
|---|---|---|
| FATAL 2012: Singular KAA | 刚度矩阵奇异 | 拘束不足 → SPC追加,除去刚体模式 |
| 特征值全部接近零 | 几何刚度矩阵近零 | 前段静力分析无应力发生 → 确认荷载设置 |
| 高阶模态是振动型 | 求模态数太多 | 有実用意义的模态数(5~20)削减 |
Abaqus *BUCKLE:
| 错误 | 意思 | 对策 |
|---|---|---|
| Zero pivot in row N | N号自由度拘束不足 | 该节点拘束确认 |
| No converged eigenvalues | Lanczos法不收敛 | 换SUBSPACE法或指定移位值 |
| Negative eigenvalues only | 荷载方向反 | 荷载符号确认 |
Ansys Eigenvalue Buckling:
| 错误 | 意思 | 对策 |
|---|---|---|
| Insufficient constraints | 有刚体模式 | 拘束自由度追加 |
| 座屈荷载著高 | 前段静力线性 PSTRES忘 | PSTRESON応力刚性有效化 |
座屈分析時、最効率的手順?
经验言、的3最速:
Step 1: 模态形状目見 —— 数値的前可視化。物理的得变形入力间違。问题的8割切分。
Step 2: 最小模型理论解照合 —— 1本的柱(梁单元5~10个)的理论解再现。合求解器设定根本的间违。
Step 3: 段階的复杂化 —— 最小模型合、网格的细分化→境界条件的详细化→材料模型的追加、一变再実行。的段階原因特定。
"実模型悩"的、"最小模型一歩积上"的远回见最速的道。
"线性座屈実験合"当前
座屈的线形FEM分析値実験值比、実験的20~40%低珍。原因初期不整(制作时的曲 $L/1000$ 程度)溶接残留応力(降伏応力的30~50%相当)。完璧真直柱仮定线形分析必然的过大評価。実测的不整数据反映非线形座屈分析(NLBA)行、実験 $\pm$10%以内一致的通常。"理論通行"的、"线形座屈上限値出分析"理解的正。
更详细
错误