オイラー座屈解析
オイラー座屈の理論基礎
座屈とは何か
座屈って、引張破壊と違って突然起こるんですか? アルミ缶を踏むと急にグシャッと潰れるのを見て気になって。
まさにそのアルミ缶が座屈の好例だ。缶を真上からゆっくり押すと、ある力までは何事もなく耐えている。でも臨界点を超えた瞬間、側面が横にポコッと飛び出して一気に潰れる。材料が割れたわけじゃないのに、形が安定を失う現象 ―― これが座屈だ。
材料は無事なのに構造が崩壊するって、怖くないですか? 応力計算だけでは予測できない?
そこが引張・曲げと決定的に違うポイントだ。引張なら「応力が降伏点を超えるか?」で判断できるけど、座屈は幾何学的な安定性の問題だから、応力が降伏点の半分以下でも起きる。1757年にレオンハルト・オイラーがこれを世界で初めて数学的に定式化した。だから今でも「オイラー座屈」と呼ぶ。
1757年!? 270年以上前の理論が今のCAEでも使われてるんですか。
オイラーは当時の数学の最高峰だからね。変分法を使って「柱がどの荷重で不安定になるか」を解析的に求めた。この公式が今日のCAEにおける座屈固有値解析の出発点になっている。まず導出を追ってみよう。
支配方程式の導出
オイラーの式って、どうやって導くんですか?
まず、軸力 $P$ を受ける柱がわずかに横方向にたわんだ状態を考える。たわみを $y(x)$ とすると、そのたわみによって追加のモーメント $M = -Py$ が生じる。これをオイラー・ベルヌーイ梁の曲げ方程式に代入すると:
$EI$ は曲げ剛性ですよね。式の見た目はシンプルですけど…。
これは2階の線形常微分方程式で、$k^2 = P/(EI)$ と置くと $y'' + k^2 y = 0$ になる。一般解は:
サインとコサイン! 単振動の式と同じ形ですね。
まさにそう。ここに境界条件を入れる。両端ピン支持($y(0) = 0$, $y(L) = 0$)なら、$B = 0$ となり $A\sin(kL) = 0$。たわみがある解($A \neq 0$)を求めたいから:
$n = 1$ が一番小さい荷重ですよね? 実構造ではそこで座屈する?
その通り。$k^2 = P/(EI)$ を戻すと、最小の臨界荷重は:
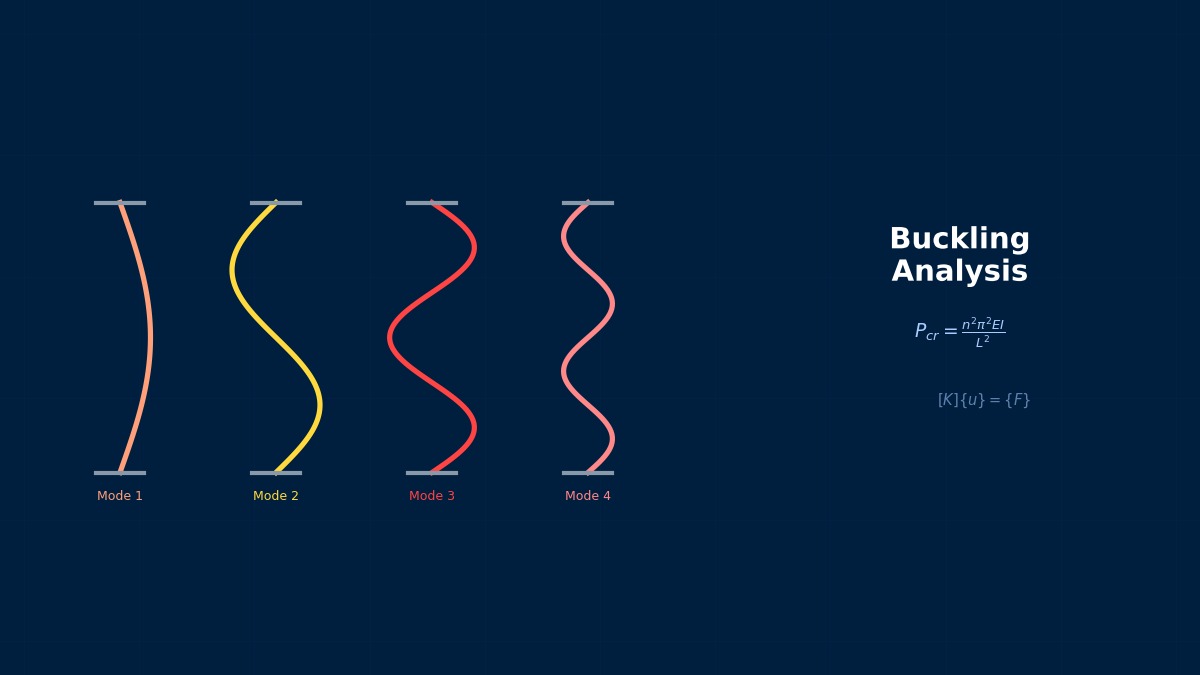
これが有名なオイラーの座屈荷重だ。$n = 2, 3, \ldots$ は高次モードだけど、実構造では最低次モード($n=1$、半波のサイン曲線)が支配的だよ。
境界条件と有効座屈長さ
両端ピンの場合はわかりました。でも実際の柱って、基礎にボルト止めされてたり、上端がスラブに繋がってたりしますよね。
そこで登場するのが有効座屈長さ係数 $K$ だ。実際の境界条件での座屈長さを「等価な両端ピン柱の長さ」に換算する。一般式はこうなる:
| 境界条件 | K値 | $P_{cr}$ の比率 | 実務での例 |
|---|---|---|---|
| 両端ピン | 1.0 | 1.0(基準) | トラス部材の理想化 |
| 一端固定・一端自由(片持ち) | 2.0 | 0.25 | 旗竿、自立柱 |
| 両端固定 | 0.5 | 4.0 | コンクリート壁間の柱 |
| 一端固定・一端ピン | 0.7 | 2.04 | 鉄骨フレームの柱脚固定・梁接合 |
$K = 2.0$ の片持ちは、同じ長さの両端ピンに比べて $P_{cr}$ が4分の1!? そんなに違うんですか。
$P_{cr}$ は $(KL)^2$ に反比例するからね。片持ち柱の設計では特に注意が必要だ。逆に両端固定なら $K = 0.5$ だから同じ柱でも $P_{cr}$ は4倍になる。例えばビル鉄骨の柱は、横つなぎ梁やブレースで端部を拘束すると $K$ を下げられる ―― つまり座屈に強くなる。
でも現実のボルト接合って「完全固定」でも「完全ピン」でもないですよね?
鋭い。実際の接合部は「半剛接合」で、$K$ 値は理論値と異なる。だから設計コード(AIJやEurocode 3)では安全側に $K$ を大きめに取るよう指導している。CAEでは回転バネ要素を入れて半剛接合を表現するテクニックもある。ここを甘く見ると危険だ。
細長比と適用範囲
太くて短い柱は座屈しないんですか? ずんぐりした柱を圧縮しても横に曲がるイメージが湧かなくて。
核心的な質問だ。臨界応力で書き直すとわかりやすい:
ここで $r = \sqrt{I/A}$ は断面の回転半径、$KL/r$ が細長比(slenderness ratio)だ。細長比が大きいほど $\sigma_{cr}$ は下がる ―― つまり細長い柱ほど座屈しやすい。
じゃあ逆に、すごく太い柱(細長比が小さい柱)だと $\sigma_{cr}$ が降伏応力を超えちゃいますよね? そんなこと物理的にあり得るんですか?
まさにそこがオイラー式の適用限界だ。$\sigma_{cr} > \sigma_Y$(降伏応力)になるような短い柱では、座屈する前に材料が先に降伏してしまう。オイラー座屈が有効な条件は:
鋼($E = 200$ GPa, $\sigma_Y = 250$ MPa)なら $KL/r > 89$ 程度。これより細長比が小さい「中間柱」には、Johnsonの放物線式や接線係数理論を使う必要がある。
CAEで座屈解析するとき、この区分を意識しないとまずいですか?
非常にまずい。線形座屈解析(固有値解析)はオイラー型の弾性座屈を前提としている。細長比が小さい部材に線形座屈解析だけかけると、実際より高い座屈荷重が出て危険側の評価になる。そういう場合は非線形座屈解析(幾何学的非線形+材料非線形)が必要だ。
初期不整の影響
教科書の柱は完璧にまっすぐですけど、実際に工場で作った柱って微妙に曲がってますよね。それって座屈に影響するんですか?
非常に大きく影響する。現実の柱には製造誤差・溶接残留応力・運搬時の変形による初期不整(initial imperfection)が必ずある。完璧な柱は理論上 $P_{cr}$ まで真っ直ぐのままだが、初期不整があると荷重増加とともに徐々にたわみが増大する。
初期たわみ $y_0 = a_0 \sin(\pi x / L)$ がある場合、荷重 $P$ でのたわみは:
$P$ が $P_{cr}$ に近づくと分母がゼロに…たわみが発散する!
そう。これが不整敏感性だ。実構造では $P_{cr}$ に到達する前に過大なたわみや塑性が生じて崩壊する。だから設計では安全率をかけるし、CAEでは初期不整を導入した非線形解析が重要になる。
具体的にはどうやって初期不整を入れるんですか?
典型的な方法は2つある:
- 座屈モード法 ―― 線形座屈解析の1次モード形状を微小振幅(部材長の $L/1000$ 程度)でスケーリングして初期形状に与える
- 設計コード法 ―― 製作公差に基づく不整パターン(例:AIJの $L/1000$、Eurocode の $L/500$)を直接形状に反映する
Abaqusなら *IMPERFECTION キーワード一つで1次モードをそのまま初期不整に取り込めるから非常に簡単だ。
理論のまとめ
ここまでの理論で押さえるべきポイントを整理したいです。
4つだ:
- 座屈は材料破壊ではなく安定性の問題 ―― 弾性範囲内で起きる幾何学的不安定現象
- $P_{cr} = \pi^2 EI / (KL)^2$ ―― 境界条件($K$値)が座屈荷重を支配する
- 細長比で適用範囲が決まる ―― 短い柱にオイラー式を使うと危険側の過大評価になる
- 初期不整が実挙動を大きく左右する ―― 完璧な柱の理論値 $P_{cr}$ を鵜呑みにしてはいけない
座屈って「材料が持つかどうか」じゃなくて「形が安定かどうか」の問題なんですね。応力値だけ追いかけてると見落としそうです。
その感覚は大事にしてほしい。座屈解析は数値を出すだけじゃなく、なぜその構造が不安定になるのかを物理的に理解することが本質だ。
オイラーの天才と座屈理論の誕生
1744年にLeonhard Eulerが発表した座屈荷重の公式 $P_{cr}=\pi^2 EI/(KL)^2$ は、当時の学者を驚かせた。「臨界荷重が材料の強度に全く依存せず、断面形状($I$)と長さ($L$)だけで決まる」とは誰も予想していなかったからだ。Euler自身もこの式の実用性に自信がなかったと伝えられるが、現在の細長柱設計の基礎として270年以上にわたり使い続けられている。
オイラー座屈の数値計算手法
FEMによる座屈解析の定式化
オイラーの理論式がわかったところで、これをFEMではどう解くんですか? 普通の $[K]\{u\} = \{F\}$ とは違う?
本質的に異なる。普通の静解析は連立方程式を解くだけだけど、座屈解析は固有値問題になるんだ:
ここで $[K]$ は通常の弾性剛性マトリクス、$[K_\sigma]$ は幾何剛性マトリクス(応力剛性マトリクス)、$\lambda$ が座屈荷重係数、$\{\phi\}$ が座屈モード形状だ。
固有値問題って、振動解析でも $([K] - \omega^2 [M])\{\phi\} = \{0\}$ って出てきましたよね。形が似てる…。
数学的にはまったく同じ構造だ。振動の質量マトリクス $[M]$ が、座屈では幾何剛性マトリクス $[K_\sigma]$ に入れ替わっただけ。この対応関係を掴んでおくと、ソルバーのマニュアルを読むときにも理解が格段に早くなるよ。
$[K_\sigma]$ って何者なんですか? 名前からして普通の剛性マトリクスとは違いそうですけど。
通常の $[K]$ は材料の弾性率と形状から決まる ―― 荷重によらない。一方 $[K_\sigma]$ は現在の応力状態に依存する。圧縮応力があると $[K_\sigma]$ の寄与は負になり、全体の剛性を下げる方向に働く。
あ、わかった! 圧縮荷重が増えるにつれて構造が「柔らかく」なっていって、あるポイントで全体の剛性がゼロになる ―― それが座屈点なんですね!
完璧な理解だ。$[K] + \lambda [K_\sigma]$ が特異になる(行列式がゼロになる)ときの $\lambda$ が座屈荷重係数。参照荷重 $\{F_{ref}\}$ に $\lambda$ をかけたものが臨界荷重になる。
幾何剛性マトリクスの構築
$[K_\sigma]$ は具体的にどうやって作るんですか?
梁要素の場合で考えよう。軸力 $N$ を受ける梁要素の幾何剛性マトリクスは:
軸力 $N$ が直接入っているから、応力状態に依存するのが明確だろう。
ということは、座屈解析ではまず静解析で応力を求めてから、その応力で $[K_\sigma]$ を作って固有値問題を解く、という2段階の手順になるんですか。
その通り。NastranならSOL 105、AbaqusならBuckleステップの前にStaticステップを置く。この前段の静解析を忘れると $[K_\sigma]$ が作れない ―― ありがちなミスだから注意してくれ。
固有値ソルバーの選択
固有値問題を解くアルゴリズムにも種類があるんですか?
もちろん。座屈解析で使われる主な手法を整理しよう:
| 手法 | 特徴 | 適用場面 |
|---|---|---|
| 逆反復法 | 最小固有値に高速収束 | 1次モードだけ欲しいとき |
| Lanczos法 | 大規模疎行列に強い。複数モード同時取得 | 実務で最も標準的 |
| サブスペース反復法 | Lanczosより安定だが遅い | 古いコードやクラスタリング固有値 |
| Block Lanczos法 | Lanczosの並列化版 | 大規模HPC環境 |
Lanczos法が標準なんですね。モード数はいくつ求めればいいですか?
1次モードだけでは絶対に足りない。少なくとも5〜10モードは求めるべきだ。理由は2つある:
- クラスタリング ―― 1次と2次の固有値が近いと、モード間の相互作用で実際の座屈挙動が変わる
- 局所座屈の見落とし ―― フランジの局所座屈が全体座屈より低い固有値を持つことがあり、1次モードだけだと検出できない場合がある
線形座屈 vs. 非線形座屈
線形座屈解析だけではダメな場合があるって聞きました。非線形座屈とはどう使い分けるんですか?
整理するとこうだ:
| 手法 | 解くもの | 前提 | 得られるもの |
|---|---|---|---|
| 線形座屈(固有値解析) | $([K] + \lambda [K_\sigma])\{\phi\} = \{0\}$ | 微小変形、弾性、初期不整なし | 座屈荷重係数 $\lambda$ とモード形状 |
| 非線形座屈(Riks法等) | 荷重-変位の平衡経路追跡 | 大変形、材料非線形、初期不整あり | 実際の崩壊荷重と後座屈挙動 |
非線形のほうが正確なら、最初からそっちをやればいいのでは?
計算コストが桁違いだ。線形座屈は固有値問題1回で済むけど、非線形は荷重増分ごとに平衡反復を回す。100倍以上の計算時間がかかることもある。
実務的なアプローチはこうだ:
- まず線形座屈解析で座屈荷重の目安とモード形状を把握
- そのモード形状を初期不整として与えて非線形解析を実施
- 非線形解析では弧長法(Riks法)を使い、荷重のピーク(限界点)を通過して後座屈パスも追跡
Riks法ってどういう仕組みですか? 普通のNewton-Raphson法ではダメなの?
Newton-Raphson法は荷重を制御量にするから、荷重-変位曲線のピーク(限界点)を通過できない。Riks法は弧長をパラメータにして、荷重と変位を同時に変化させる:
これにより荷重の折り返し(スナップスルー、スナップバック)も追跡できる。座屈の後座屈挙動を見たいときに不可欠な手法だ。
メッシュの要件
座屈解析ではメッシュに特別な注意が必要ですか? 普通の静解析より細かくすべき?
非常に重要だ。座屈モード形状を正しく表現するには、座屈波長に対して十分なメッシュ密度が必要になる:
- 座屈の半波長あたり最低4〜6要素(2次要素の場合)
- 薄板・シェル構造では板厚方向にも注意(ソリッド要素なら最低2層)
- 局所座屈を捕捉するには、フランジやウェブにも十分な要素数が必要
座屈の半波長がわからない段階では、どうメッシュを決めればいいですか?
まさにそこが実務の難しさだ。まず粗めのメッシュで線形座屈を回し、モード形状を確認してから、座屈変形が集中する部位のメッシュを細分化して再解析する。メッシュ収束性の確認(粗・中・密の3水準で座屈荷重が2〜3%以内に収まるか)は必須だ。
もう一つ注意。薄肉構造ではシェル要素のほうがソリッド要素より効率的かつ正確なことが多い。ソリッドで薄板をモデル化するとシアロッキングで剛性が過大評価され、座屈荷重も高く出てしまう。
細長比の目安を覚えておこう
Euler柱の細長比 $\lambda = KL/r$ は安全性の最初のバロメーターだ。$\lambda > 120$ では弾性座屈、$\lambda < 60$ では材料降伏が先に起きる。$\lambda = 60 \sim 120$ の「中間柱」では弾塑性座屈(Tangent Modulus Theory)を使う必要がある。AISC鋼構造設計マニュアルでは $\lambda_c = 4.71\sqrt{E/F_y}$ が弾性・弾塑性の分岐点として規定されている。実務で柱を見たら、まず細長比を暗算してみるとよい。
オイラー座屈の実務適用
座屈解析の実務フロー
理論と数値手法はわかりました。いざ実務で座屈解析をやるとき、最初のステップは何ですか?
座屈解析は「解析を回す前」の準備が勝負を決める。全体のフローはこうだ:
- 設計情報の整理 ―― 部材形状、材料、支持条件、荷重条件を洗い出す
- 手計算で目安を出す ―― オイラー式で臨界荷重を概算。桁が合うかの検証用
- モデル化方針の決定 ―― 要素タイプ、モデル範囲、対称性の利用可否
- 線形座屈解析の実施 ―― 座屈荷重係数とモード形状を確認
- 必要に応じて非線形解析 ―― 初期不整導入、Riks法で実崩壊荷重を評価
- 結果の検証 ―― 手計算との比較、メッシュ収束性、モード形状の妥当性
ステップ2の「手計算」って、CAEがあるのになぜ必要なんですか?
CAEの結果がおかしいとき、比較対象がないと気づけないからだ。例えば両端ピンの鋼柱($L = 3$ m、H形鋼 H200$\times$100)なら、弱軸の $I_{min}$ を使って:
FEMの結果がこの桁と全然違えば、入力ミスを疑える。「答えの大きさ」を先に知っておくのが鉄則だ。
モデル化の勘所
柱の座屈なら梁要素で十分ですか? それともシェルやソリッドが必要?
ケースによる。判断基準はこうだ:
| モデル化 | 向いている場合 | 注意点 |
|---|---|---|
| 梁要素 | 断面が一様で全体座屈のみ評価 | 局所座屈(フランジの波打ち等)は捕捉できない |
| シェル要素 | 薄肉開断面(H形鋼等)、板の座屈 | 局所座屈も自動的に出る。最も汎用性が高い |
| ソリッド要素 | 肉厚部材、接合部の詳細評価 | 計算コスト大、シアロッキングに注意 |
実務ではまず梁モデルで全体挙動を把握し、気になる部位をシェルでサブモデリングするのが効率的だ。
境界条件のモデル化で気をつけることは? 理論の「ピン」「固定」と現実は違いますよね。
まさに実務の泣きどころだ。実際のボルト接合は「半剛接合」で、$K$ 値は理論値と異なる。対処法は:
- 保守的アプローチ ―― 固定度を低く仮定($K$ を大きめに設定)し安全側に評価
- 回転バネモデル ―― 接合部にバネ要素(回転剛性)を入れて半剛接合を表現
- 詳細モデル ―― 接合部をソリッド要素+接触で直接モデル化(研究・検証用)
設計段階では保守的アプローチ、詳細検討では回転バネ、が一般的だ。
主要ソルバーでの設定手順
3大ソルバー(Nastran、Abaqus、Ansys)での具体的な設定方法を教えてください。
Nastran(SOL 105):
SOL 105
CEND
SPC = 1
LOAD = 1
METHOD = 10
BEGIN BULK
EIGRL, 10, , , 10 $ 10モードを要求
...
ENDDATAポイントはEIGRLカードでモード数を指定すること。デフォルトの1モードでは不十分だ。
Abaqus(*BUCKLE):
*STEP
*BUCKLE
10, , , $ 10モードを要求
*CLOAD
...
*END STEPBuckleステップの前に必ずStaticステップを置くこと。非線形座屈なら代わりに *STATIC, RIKS を使う:
*STEP, NLGEOM=YES
*STATIC, RIKS
0.01, 1.0, 1e-8, 0.1Ansys Mechanical(APDL):
/SOLU
ANTYPE, STATIC
SOLVE
FINISH
/SOLU
ANTYPE, BUCKLE
BUCOPT, LANB, 10 ! Lanczos法で10モード
SOLVE
FINISHWorkbenchなら「Eigenvalue Buckling」解析を追加し、Static解析の後にリンクするだけだ。GUI操作で最も手軽に座屈解析を始められる。
結果の読み方と検証
座屈解析が終わりました。まず何をチェックすればいいですか?
3つのステップで確認する:
1. 座屈荷重係数 $\lambda$ の値:
- $\lambda > 1.0$:参照荷重の範囲では座屈しない(安全側)
- $\lambda < 1.0$:参照荷重以下で座屈する(設計変更が必要)
- $\lambda$ が負:引張側の座屈であり、通常は無視
2. モード形状の確認:
- 全体座屈か局所座屈かを視覚的に判断
- 拘束の効果がモード形状に正しく反映されているか
- 物理的にあり得ない変形パターンがないか
3. 手計算との照合:
- オイラー式の概算値と桁が合っているか(2倍以上のずれは入力ミスの兆候)
$\lambda$ が1.2だったら「ギリギリ大丈夫」と言えますか?
言えない。線形座屈の $\lambda$ は上限値であって、初期不整・残留応力の影響で実際の崩壊荷重はもっと低くなる。設計コードの安全率(通常2.0〜3.0)を考慮すること。$\lambda = 1.2$ は「設計上不足の可能性が高い」という判断になる。
実務チェックリスト
座屈解析を実施するたびに確認すべきチェックリストだ:
- ☐ 手計算で座屈荷重の桁を事前に確認したか
- ☐ 座屈方向(強軸/弱軸)を正しく評価しているか
- ☐ 十分なモード数(5〜10以上)を求めたか
- ☐ モード形状を可視化して物理的妥当性を確認したか
- ☐ 局所座屈モードを見逃していないか
- ☐ メッシュ収束性を確認したか(粗・中・密の3水準)
- ☐ 境界条件の固定度が実構造と整合しているか
- ☐ 細長比から、オイラー座屈の適用範囲内か確認したか
- ☐ 必要に応じて非線形解析(初期不整+Riks法)を実施したか
- ☐ 設計コードの安全率を適用したか
このリスト、毎回の解析レポートに添付する運用にしたいです。
いい心がけだ。座屈は「計算が回る」ことと「正しい答え」の間に大きなギャップがある分野だ。チェックリストを形骸化させずに、毎回一つ一つ確認する習慣をつけてほしい。
東京スカイツリーと座屈設計
東京スカイツリー(634 m、2012年完成)の鋼製部材は、地震・強風・自重の複合荷重下での座屈設計が最大の課題だった。全鋼部材の細長比を管理し、局所座屈を排除するために、板厚・幅厚比の選定が徹底された。高さ250 m以上の全柱部材に弾塑性座屈評価が適用され、2000年改正の性能規定型設計法のショーケースとなった。
オイラー座屈のソフトウェア比較
商用ツールの座屈機能
座屈解析ってどのソフトでもできるんですか? 得意不得意はある?
主要な汎用FEMソルバーならどれでも線形座屈解析は可能だ。ただし座屈に特化した機能の充実度はかなり差がある。特に非線形座屈(弧長法)や初期不整導入の使い勝手が違う。
Nastranの座屈解析
Nastranは座屈解析の元祖と聞きますが、実際どうなんですか?
NastranはNASAが1960年代に宇宙構造の座屈評価のために開発したコードだから、まさに座屈解析の原点だ。
| ソリューション | 用途 | 特徴 |
|---|---|---|
| SOL 105 | 線形座屈 | 固有値解析。最も基本的。計算が速い |
| SOL 106 | 非線形静解析 | 大変形対応。PARAM,BUCKLEで弧長法を使った座屈追跡 |
| SOL 400 | 高度非線形 | 接触・材料非線形との組み合わせ |
Nastranの最大の強みは大規模モデルでの安定性だ。自動車ボディ全体(数百万DOF)の座屈解析でもLanczos法が安定して動く。航空宇宙と自動車業界でNastranが根強い理由はここにある。特にPCOMP(複合材パネル)との組み合わせでの座屈評価は他の追随を許さない。
Abaqusの座屈解析
Abaqusは非線形に強いイメージですが、座屈でもそうですか?
Abaqusの非線形座屈における使いやすさは業界トップだ。
| ステップタイプ | 用途 | 特徴 |
|---|---|---|
| *BUCKLE | 線形座屈 | Lanczos法またはサブスペース法 |
| *STATIC, RIKS | 非線形座屈 | Modified Riks法。後座屈パス追跡の定番 |
| *STATIC, STABILIZE | 不安定問題の安定化 | 人工粘性で座屈通過を安定化 |
特に *IMPERFECTION キーワード一つで線形座屈のモード形状をそのまま初期不整として取り込める。Nastranだと同じことにDMAPが必要で手間がかかる。座屈研究の論文でAbaqusが多いのは、このRiks法と初期不整導入の完成度に因るところが大きい。
Ansys Mechanicalの座屈解析
Ansysはどういう位置づけですか? Workbenchが使いやすそうですが。
Ansysは座屈解析の敷居が最も低いソルバーと言える。
| 解析タイプ | 用途 | 特徴 |
|---|---|---|
| Eigenvalue Buckling | 線形座屈 | Workbenchから直感的に設定可能 |
| Static Structural(NLGEOM=ON) | 非線形座屈 | Arc-Length法オプション |
| パラメトリック解析 | 設計最適化 | 形状パラメータと座屈荷重の関係を自動評価 |
Workbenchの強みはパラメトリック座屈評価だ。「フランジ厚を10 mmから20 mmまで1 mm刻みで変えたとき、座屈荷重がどう変わるか」を自動で回せる。設計最適化にはこの機能が非常に効率的だ。
座屈解析の機能比較表
座屈解析に絞った3大ソルバーの比較表だ:
| 機能 | Nastran | Abaqus | Ansys |
|---|---|---|---|
| 線形座屈 | SOL 105 | *BUCKLE | Eigenvalue Buckling |
| 弧長法(Riks法) | SOL 106 + PARAM | *STATIC, RIKS | Arc-Length |
| 初期不整導入 | DMAP/外部ツール | *IMPERFECTION(簡単) | UPGEOM(やや手間) |
| 後座屈の人工安定化 | 限定的 | *STABILIZE(優秀) | 安定化あり |
| 大規模並列 | 非常に強い | 強い | 強い |
| パラメトリック座屈 | 外部連携が必要 | Pythonスクリプト | Workbench GUI |
| シェル座屈の実績 | 航空宇宙で圧倒的 | 研究用途で豊富 | 一般産業で広い |
結局、どう選べばいいですか?
ざっくり言うと:
- 航空宇宙・複合材パネルの座屈 → Nastranがファーストチョイス
- 後座屈の詳細評価・学術研究 → AbaqusのRiks法が最も使いやすい
- 設計段階のパラメトリック評価 → Ansys Workbenchが効率的
「全部入り」の万能ソルバーは存在しない。重要なのはツールの限界を理解した上で使うこと。どのソルバーでも、座屈の物理を理解していないエンジニアが回すと、もっともらしいけど間違った答えが出る。
OSSの選択肢
予算が限られた大学の研究室でも使えるオープンソースツールはありますか?
Code_Aster(フランス電力公社EDF開発)が有力だ。線形座屈・非線形座屈ともに対応し、GUIはSalome-Mecaを使う。CalculiXもAbaqusの入力フォーマット(.inp)と互換性があるのが特徴で、Abaqusのモデルをそのまま流用できることもある。
ただし最大の注意点は検証の責任が全て自分にあること。商用ツールはベンダーがNAFEMS等のベンチマークで検証しているが、OSSは自分でベンチマーク比較をして信頼性を確認する必要がある。座屈は結果のばらつきが大きい分野だから、この検証コストを軽視してはいけない。
ソルバー選びの意外な決め手
座屈解析のソルバー選定で意外と効いてくるのが「社内にノウハウがあるか」だ。Zaha Hadid Architects社はDlubal RFEM/RSTABを使い、曲線鉄骨柱(細長比 $\lambda > 180$)のEurocode準拠座屈チェックを繰り返し検証して型式証明を取得した。最先端の建築でも、実績のあるツールと手慣れたエンジニアの組み合わせが最強という好例だ。
オイラー座屈のトラブル対応
負の固有値が出る
線形座屈解析を回したら、固有値が全部マイナスです。バグですか?
バグではない。負の固有値は参照荷重の反対方向で座屈が起きることを意味する。圧縮荷重として与えたのに引張方向の座屈が出ている状態だ。
| 原因 | 状況 | 対策 |
|---|---|---|
| 荷重方向の符号ミス | 引張を圧縮として入力 | 荷重方向(座標軸の正負)を確認・修正 |
| 反力方向の座屈 | 反力が圧縮になる部材がある | 正の固有値のみ評価する |
| モード数不足 | 負の固有値に埋もれて正の最低モードが出ない | 求めるモード数を20以上に増やす |
10モード求めて全部負だったら、荷重方向を完全に間違えている可能性が高い。
座屈荷重が手計算と合わない
オイラー式で $P_{cr} = 293$ kN と計算したのに、FEMでは450 kNでした。5割も高い…。
FEMが手計算より高い場合、3つの原因を順に確認しよう:
1. 座屈方向は正しいか?
オイラー式では $I_{min}$(最小慣性モーメント)を使う。H形鋼なら弱軸回り。FEMで強軸回りの座屈が出ていないか、モード形状を必ず確認。弱軸方向の変位を拘束していると、弱軸座屈が抑制されて見えなくなることがある。
2. 境界条件の固定度は正しいか?
$K = 1.0$(両端ピン)のつもりなのに回転が拘束されて $K = 0.5$(両端固定)相当になっていると、$P_{cr}$ は4倍に跳ね上がる。
3. 要素タイプは適切か?
梁要素でワーピング自由度を考慮しないと、開断面(H形鋼、溝形鋼)の座屈荷重が過大になる。
逆にFEMのほうが手計算より低い場合は?
その場合は局所座屈が先行している可能性が高い。オイラー式は全体座屈しか評価しないが、シェルやソリッドでモデル化するとフランジの局所座屈が先に出ることがある。モード形状が全体の横たわみではなく、局部的な波打ちになっていないか確認してくれ。
非線形座屈が収束しない
Riks法で非線形座屈を回したら、座屈点の手前で収束しなくなります…。
非線形座屈で最もよくあるトラブルだ。原因は3つ:
原因1: 初期不整が入っていない
完璧に対称な構造に対称荷重をかけると、数値的に分岐点を通過できない。小さな摂動がないとソルバーは真っ直ぐな平衡経路に留まろうとする。対策は線形座屈の1次モード形状を振幅 $L/1000$ 程度で初期不整として導入すること。
原因2: 増分幅が大きすぎる
座屈点付近は荷重-変位曲線の勾配が急変する。Riks法なら初期弧長を荷重の1%程度に設定し、最小増分をさらに小さくする。Abaqusの例:0.01, 1.0, 1e-8, 0.1
原因3: 接触や境界の急変
座屈で大変形が起きると接触条件やバネの状態が急変して収束を乱す。デバッグではまず境界条件を極力単純化(理想ピン・固定)して収束を確認してから、段階的に複雑にする。
座屈モードがメッシュに依存する
メッシュを変えるたびに座屈荷重やモード形状が変わってしまいます。
メッシュ収束性の確認が不可欠だ:
- 粗いメッシュで解析 → 座屈荷重と上位5モードを記録
- メッシュを2倍に細分化 → 同じ確認
- さらに2倍 → 同じ確認
- 座屈荷重の変化が2〜3%以内に収まれば十分
全体座屈は比較的メッシュに鈍感だが、局所座屈(板の波状座屈など)は座屈半波長に対して要素が4つ以上ないと正しく表現できない。特に板の自由辺付近はメッシュ密度に非常に敏感だ。粗いメッシュでは局所座屈モードが「見えない」状態になり、全体座屈荷重だけが計算される ―― 結果として座屈荷重を過大評価する危険がある。
ソルバー別のよくあるエラー
各ソルバーで見かけるエラーメッセージと対策を教えてください。
Nastran SOL 105:
| エラー | 意味 | 対策 |
|---|---|---|
| FATAL 2012: Singular KAA | 剛性マトリクスが特異 | 拘束不足 → SPCを追加して剛体モードを除去 |
| 固有値が全てゼロ付近 | 幾何剛性マトリクスがほぼゼロ | 前段の静解析で応力が発生していない → 荷重設定を確認 |
| 上位モードが振動的 | 求めたモード数が多すぎる | 実用上意味のあるモード数(5〜20)に絞る |
Abaqus *BUCKLE:
| エラー | 意味 | 対策 |
|---|---|---|
| Zero pivot in row N | N番目のDOFが拘束不足 | 該当ノードの拘束を確認 |
| No converged eigenvalues | Lanczos法が収束しない | SUBSPACE法に切替、またはシフト値を指定 |
| Negative eigenvalues only | 荷重方向が逆 | 荷重の符号を確認 |
Ansys Eigenvalue Buckling:
| エラー | 意味 | 対策 |
|---|---|---|
| Insufficient constraints | 剛体モードあり | 拘束DOFの追加 |
| 座屈荷重が著しく高い | 前段の静解析が線形のまま | PSTRESをONにして応力剛性を有効化 |
座屈解析でトラブったとき、最も効率的なデバッグ手順は何ですか?
経験則から言うと、この3ステップが最速だ:
Step 1: モード形状を目で見る ―― 数値の前にまず可視化。物理的にあり得ない変形なら入力が間違っている。これで問題の8割は切り分けられる。
Step 2: 最小モデルで理論解と照合する ―― 1本の柱(梁要素5〜10個)でオイラーの理論解を再現する。これが合わなければソルバー設定が根本的に間違っている。
Step 3: 段階的に複雑化する ―― 最小モデルが合ったら、メッシュの細分化→境界条件の詳細化→材料モデルの追加、と一つずつ変えて再実行。どの段階でおかしくなるかで原因を特定できる。
「いきなり実モデルで悩む」のではなく、「最小モデルから一歩ずつ積み上げる」のが遠回りに見えて最速の道だ。
「線形座屈が実験と合わない」は当たり前
オイラー座屈の線形FEM解析値と実験値を比べると、実験のほうが20〜40%低くなることが珍しくない。原因は初期不整(製作時の曲がり $L/1000$ 程度)と溶接残留応力(降伏応力の30〜50%相当)だ。完璧に真っ直ぐな柱を仮定する線形解析は必然的に過大評価になる。実測の不整データを反映した非線形座屈解析(NLBA)を行えば、実験と $\pm$10%以内で一致するのが通常だ。「理論通りに行かない」のではなく、「線形座屈は上限値を出す解析」と理解するのが正しい。
なった
詳しく
報告