Acoustic Modal Analysis
Acoustic Modal: Theoretical Foundations
What is Acoustic Modal Analysis?
Professor, does acoustic modal analysis analyze the "vibration of air" rather than the vibration of a structure?
Yes. It finds the natural frequencies and mode shapes of the air inside an enclosed space (passenger compartment, room, duct, etc.). If structural natural vibration is "bone vibration," then acoustic modal is "flesh (air) vibration."
Governing Equation
Helmholtz equation for the acoustic field:
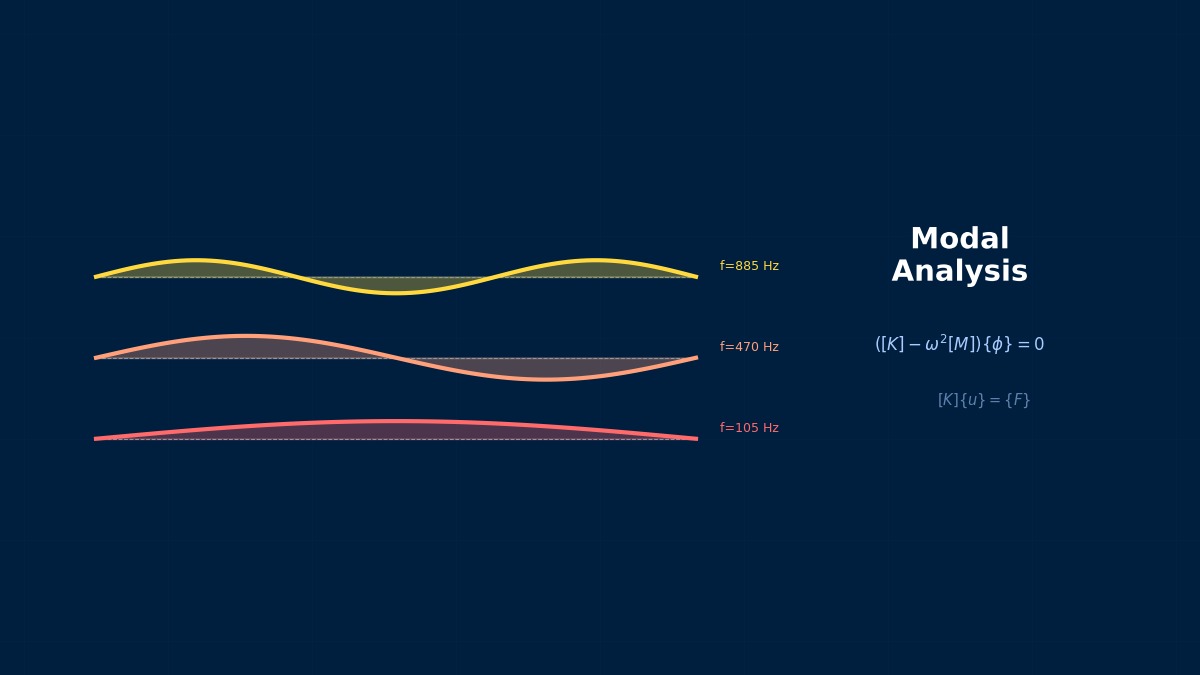
$p$ is sound pressure, $c$ is speed of sound. Discretized with FEM:
It has exactly the same form as the structural eigenvalue problem $([K] - \omega^2 [M])\{u\} = \{0\}$!
Correct. The only change is that the unknown is sound pressure $p$ instead of displacement $u$. It can be solved with the same Lanczos method.
Acoustic Modes of a Passenger Compartment
Typical acoustic modes inside an automobile passenger compartment:
| Mode | Frequency | Characteristics |
|---|---|---|
| 1st Longitudinal Mode | 80–120 Hz | Standing wave in front-rear direction |
| 1st Lateral Mode | 200–300 Hz | Left-right direction |
| 1st Vertical Mode | 300–400 Hz | Up-down direction |
The 1st longitudinal mode at 80 Hz is close to engine rotational vibration, right?
The 2nd order (major order) of a 4-cylinder engine is 100 Hz at 3000 rpm. It can potentially resonate with the 1st acoustic mode of the compartment. This is the cause of booming noise. Avoiding this resonance is crucial in NVH design.
Summary
Let me summarize acoustic modal analysis.
Key Points:
- Natural vibration of air in an enclosed space — Eigenvalue problem of the Helmholtz equation
- Same form as structural eigenvalue problem — Solvable with Lanczos method
- Booming noise in passenger compartments — Resonance between acoustic modes and structural vibration
- Foundation of NVH design — Understanding acoustic modes is the first step in noise countermeasures
Reverberation Design in Concert Halls
In 1900, Sabin (Harvard University), the father of acoustics, established the formula for reverberation time T=0.161V/A. This formula was used in the design of Boston Symphony Hall, achieving a reverberation time of 1.8 seconds. Today, calculating indoor acoustic modes with FEM reveals thousands of eigenmodes from 20Hz to 5000Hz, allowing verification of the statistical accuracy of Sabin's formula at the individual mode level.
Computational Methods for Acoustic Modal
Acoustic Analysis with FEM
What kind of elements are used for the acoustic field in FEM?
Acoustic elements are 1 degree of freedom (sound pressure $p$) elements. Their shape is the same as structural elements (tetrahedron, hexahedron, etc.), but the nodal variable is sound pressure instead of displacement.
| Solver | Acoustic Element | Remarks |
|---|---|---|
| Nastran | CAERO (panel method) or FLUID | Fluid element |
| Abaqus | AC3D4, AC3D8 | Acoustic tetrahedron/hexahedron |
| Ansys | FLUID30, FLUID220 | Acoustic element. Supports structural coupling |
So we mesh the passenger compartment with acoustic elements.
Fill the compartment space with acoustic elements. The wall surfaces (body panels) are structural elements. Define Fluid-Structure Interaction (FSI) at the interface between structure and acoustics.
Structure-Acoustic Coupling
Coupled eigenvalue problem:
$[A]$ is the structure-acoustic coupling matrix.
So structural displacement and acoustic pressure are coupled.
Panel vibration generates sound pressure in the acoustic field, and the sound pressure exerts force back on the structure. Solving this bidirectional coupling allows prediction of the transfer from structural vibration → interior cabin noise.
Summary
Let me summarize the numerical methods for acoustic modal analysis.
Key Points:
- Mesh enclosed space with acoustic elements (sound pressure DOF) — AC3D4/8 (Abaqus), FLUID30 (Ansys)
- Structure-Acoustic Coupling — Displacement and pressure couple at the interface
- Coupled eigenvalue problem — Simultaneous eigenvalues of structure and acoustics
- Core tool for NVH analysis — Prediction of interior cabin noise
Boundary Conditions for FEM Acoustic Modal Analysis
In acoustic modal analysis, air is modeled with potential fluid elements (pressure as unknown), walls are fixed as rigid bodies, and openings are free ends (P=0). The minimum mesh size for finite elements must be 1/6 or less of the wavelength λ at the highest evaluation frequency. For a 1000Hz sound wave in air (λ=340mm), the element size must be 57mm or less.
Acoustic Modal in Practice
Practical Application of Acoustic Modes
How are acoustic modes used in practice?
Automotive NVH development is the largest application.
Mesh Requirements
Acoustic element size must be 1/6 or less of the wavelength (for quadratic elements). For $f_{max} = 500$ Hz:
Element size: $0.68 / 6 \approx 0.11$ m = 110 mm.
So acoustic elements are coarser than structural ones.
Because the wavelength of sound waves is longer than that of structural elastic waves, a coarser mesh suffices. However, finer meshes are needed for high frequencies (above 1000 Hz).
Practical Checklist
Summary
So acoustic modal analysis is essential for automotive NVH.
Yes. By predicting interior cabin acoustic modes and their interaction with structural vibration, engineers can:
- Identify resonance frequencies that cause booming
- Design countermeasures (damping, panel stiffness, absorption materials)
- Optimize trim weight and cost
- Validate NVH targets early in development