空力声学分析(FW-H方程式)
空力声学分析(FW-H方程式)的理论基础
概述 — FW-H方程式是什么
老师,FW-H方程式是什么?我听说从CFD结果可以计算噪声,它是什么原理呢?
很好的问题。FW-H方程式是"Ffowcs Williams-Hawkings方程式"的缩写,由John Ffowcs Williams和David Hawkings在1969年提出。简单地说,它是将Lighthill声学类比扩展到运动物体表面的方程式。
好的……。具体来说怎么用呢? 是直接用CFD计算所有噪声吗?
这正是问题所在。声音是流体的微小压力变动,如果试图用CFD直接求解,会遇到数值衰减和反射的影响,导致精度下降。而且必须把网格扩展到观测点,计算成本会爆炸。
这时FW-H就派上用场了。CFD只计算物体附近的流场,远场的声压则通过FW-H积分方程进行后处理计算。这种两阶段方法使得飞机喷气噪声、风扇噪声、汽车侧镜风切声等实际问题都能以现实的计算成本解决。
也就是说FW-H是CFD的"后处理"!这样就能把计算域缩小……。但是,为什么通过积分就能知道远处的声音呢?
因为声音的本质是波的传播。如果知道物体表面(或周围的虚拟面)的压力和速度变动,就可以利用线性波动方程的Green函数计算任意远处点的声压。这正是FW-H积分的原理。
Lighthill声学类比
刚才提到"Lighthill的类比扩展"。先讲讲Lighthill的部分可以吗?
Lighthill声学类比(1952年)是空力声学的起点。它把Navier-Stokes方程变形成下列波动方程:
其中 $\rho' = \rho - \rho_0$ 是密度变动,$c_0$ 是均匀场的音速,$T_{ij}$ 是Lighthill应力张量,定义为:
$T_{ij}$代表什么?右边有动量、压力、粘性应力等各种项……。
关键是左边的形式是"静止均匀介质中的波动方程"。右边的$T_{ij}$可以理解为"等效声源"。也就是说,"把实际湍流全部放在右边作为声源,左边则看作静止流体中的声传播"——这就是类比的本质。
实际上最主要的项是 $\rho u_i u_j$,这是喷气噪声的主因。低Mach数下其他项较小,所以可以近似为 $T_{ij} \approx \rho_0 u_i u_j$。
明白了,把湍流"读作"声源,所以叫"类比"。但这样的话,物体表面的效果就没有了吧?
说得好。Lighthill的原始定式针对的是自由空间中的湍流。要处理旋转风扇叶片或飞行飞机这样的表面效应,就需要把边界条件融入积分中。这正是FW-H方程式做的事。
FW-H方程式的定式化
现在讲FW-H方程式本身。是什么形状的?
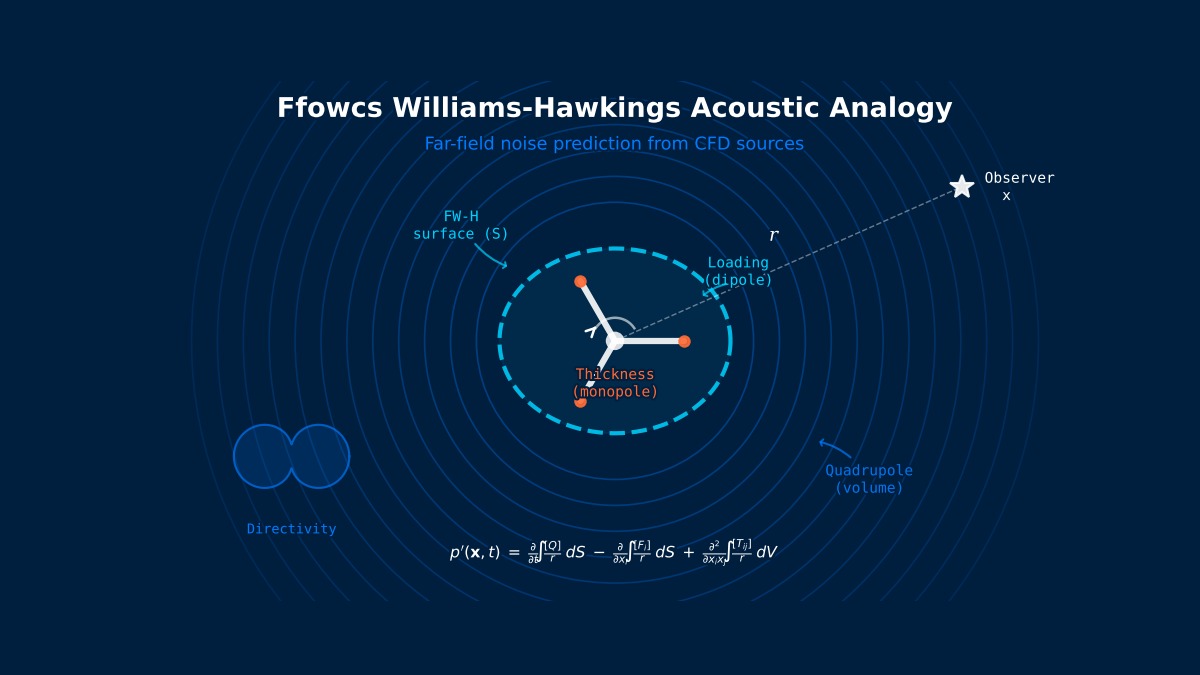
FW-H方程使用广义函数(Heaviside函数、Dirac delta函数)将Lighthill方程拓展到运动的物体表面 $f=0$。结果就是远场声压 $p'(\mathbf{x},t)$ 表示为三项之和:
其中 $[\cdot]_{\mathrm{ret}}$ 表示在延迟时间(retarded time)处的求值,$r$ 是声源点到观测点的距离,$M_r$ 是声源Mach数在观测方向的分量,$v_n$ 是面的法向速度,$\ell_i = (p\delta_{ij} - \tau_{ij})n_j + \rho u_i(u_n - v_n)$ 是加载向量。
三个声源项的物理意义
有三个项,各代表什么样的噪声呢?
好,逐个讲。
1. 厚度声源(Thickness Noise):物体运动时,前方空气被推开,后方被吸引。直升机旋翼转动时,翼片"厚度"周期性推动空气。出现在旋转频率乘以叶片数的整数倍频率(BPF:叶片通过频率)上,呈离散纯音形式。
2. 加载声源(Loading Noise):物体表面作用的压力(升力、阻力变动)产生的声音。风扇叶片与尾流相互作用导致升力变动时,就发出声音。汽车侧镜发出的"呼呼"风切声就是镜面压力变动。
3. 四极声源(Quadrupole Noise):物体外部空间的湍流本身产生的声音。喷气发动机排气的"呜"声就是典型例子。需要体积积分,计算成本高。低Mach数($M < 0.3$左右)时,与厚度、加载源相比较小,实务中常忽略。
明白了!低速的汽车和风扇就用面积分的两项够了,高Mach数的喷气发动机才需要四极项。
正是。Ansys Fluent和STAR-CCM+的FW-H实现中,默认也只启用厚度+加载的面积分,四极是选项。
透射面(Permeable Surface)定式化
"透射面"是什么?不是用实物表面,而是虚拟面?
这是非常重要的实务技巧。原始FW-H方程在固体表面上积分,但di Francescantonio(1997)提出的透射面定式在包围物体的虚拟闭曲面上积分。
优点有两个。首先,可以避免四极的体积积分。只要透射面足够大,能包含所有声源区域,面积分就能捕捉四极的贡献。其次,非线性流动效应(包括冲击波的高Mach数流)也能通过面上数据融入。
那就什么都能解决了? 没有缺点吗?
遗憾的是有。透射面FW-H中,通过面的涡会产生"虚假声源(spurious noise)"。特别是喷气跨过面的下游"盖子"时,内外侧计算的声音无法完全抵消,就产生了非物理的低频噪声。这叫end-cap问题。面的配置需要经验。
诞生FW-H方程式的两位天才
John Ffowcs Williams(威尔士人,剑桥大学教授)被誉为"航空声学之父",因Concorde超音速飞机喷气噪声研究而闻名。他的合作者David Hawkings当时还是博士生,1969年发表在《哲学汇刊》的论文成为50多年来空力声学分析的基础。另一方面,奠定理论基础的Sir James Lighthill是流体动力学的巨人,他1952年提出的声学类比引用次数超过10,000次。有趣的是,在每台喷气发动机噪声测试成本数亿日元的时代,Lighthill的论文就提出了用计算预测噪声的革命性想法。
空力声学分析(FW-H方程式)的数值计算方法
时间域积分法(Farassat 1A)
FW-H方程式怎样在计算机上实际求解? 直接数值积分吗?
实务中最常用的是Farassat 1A定式。NASA的Farassat在1980年代推导了FW-H方程在时间域的闭型解。
厚度声源的贡献为:
加载声源的贡献为:
延迟时间(retarded time)的计算看起来很复杂。从面元到观测者的声传播时间……。
这是FW-H代码实现的关键。每个面元都需要从隐式方程求解延迟时间$\tau$:
用Newton法迭代求解。均匀流中可以解析求解,但有平均流效应时需要修正。商用软件多数采用假设均匀流的快速算法。
频率域方法
除了时间域,还有其他方法吗?
在频率域也能求解FW-H方程。把面上的压力、速度数据用FFT分解为频率分量,各频率分别用Helmholtz方程的Green函数积分。
好处是只需计算关心的频率范围。缺点是要保存大量非定常数据。实务中旋转机械的纯音(BPF分量)解析适合用频率域。
与CFD的耦合流程
CFD和FW-H具体怎样协作? 数据如何交接?
典型流程是这样的:
- CFD非定常计算,在FW-H面上每个时间步记录压力$p$、密度$\rho$、速度$\mathbf{u}$
- 积累足够统计量后(通常数十到数百个流过时间),停止CFD,记录的数据传给FW-H求解器
- FW-H求解器计算各观测点的声压时历$p'(t)$
- 对声压时历进行FFT得频谱(SPL vs. 频率)、OASPL(总声压级)等指标
Ansys Fluent和STAR-CCM+都支持CFD计算同步进行FW-H积分的"动态"模式,可节省内存,但之后无法改变观测点位置。
湍流模型选择
CFD用什么湍流模型比较好? k-ε模型行不行?
RANS(k-ε、k-ω SST等)对空力声学完全不行。这是非常重要的一点。RANS计算的是时间平均流场,无法解析产生声源的瞬时压力波动。
空力声学需要:
- LES(大涡模拟):直接解大尺度涡,小尺度用SGS模型近似。最可靠但计算成本高
- DES/DDES(分离涡模拟):壁面附近用RANS,分离区用LES。实务平衡最好
- SAS(尺度自适应模拟):Menter-Egorov模型。基于URANS但能有LES级解析
例如汽车侧镜风切声用DDES+FW-H已成标准。风扇噪声优先用LES,喷气流用LES为佳,但因成本会用DDES。
网格和时间步长要求
计算噪声时网格要求比普通CFD严格吗?
严格得多。空力声学网格要求指标:
| 参数 | 推荐值 | 说明 |
|---|---|---|
| 每波长格点数 | 15~25点以上 | 按目标最大频率的音波长判定 |
| CFL数(声学CFL) | $\leq 1.0$ | $\Delta t \leq \Delta x / c_0$ |
| 采样率 | $f_s > 2 f_{\max}$ | Nyquist定理。通常$f_s \geq 20 f_{\max}$推荐 |
| FW-H面分辨率 | 10~20点/波长 | 面法向方向需充分分辨 |
| 数据记录时长 | 10~50 流过时间 | 低频解析需长记录 |
如果要解析到10kHz,波长是3.4cm,那格子宽度1.5mm左右……。很细呢。
正因如此,FW-H法的价值才体现出来。CFD网格的细密要求仅限于声源近场,远场用FW-H积分承担。若直接数值声学计算(DNC)全域细网格,计算成本会增加2~3个数量级。
空力声学分析(FW-H方程式)的实际应用
分析工作流程
空力声学分析从头开始的全流程是什么?
标准的CFD+FW-H工作流:
步骤1:定常RANS计算(初始场生成)
- 用k-ω SST等求定常解,作为非定常计算的初始条件
- 检查网格质量、y+、收敛性
步骤2:非定常LES/DES计算(声源数据生成)
- 从定常解启动切换至LES/DDES
- "过渡时间"(数个流过时间)内定常解影响消除,之后开始FW-H面数据记录
- 过渡期的数据要舍弃
步骤3:FW-H后处理(远场声压计算)
- 用记录的数据执行FW-H积分
- 得到观测点声压时历
步骤4:声学后处理
- FFT → SPL频谱、1/3倍频程、OASPL、A特性补正
- 与实验对比验证
FW-H面的配置策略
透射面放在哪儿是件重要的事对吧? 有什么指导原则吗?
FW-H面的配置直接影响结果精度,需谨慎。主要规则:
- 完全包含声源:面内侧应包含所有音源区域(涡放出域、分离域、喷气混合域)
- 放在非线性效应衰减的位置:强涡或冲击波穿过面会产生虚假声源
- 放在CFD网格足够细的区域:粗化网格区的面会让声源数据退化
- 面法向周围留3~5单元缓冲:离开口边界或海绵层太近
- 多个面位置验证稳健性:轻微移动面,结果应变化不大
面位置稍动结果就变的话,很吓人啊……。实务怎样保证可信度?
经验做法是至少用3个不同尺寸的透射面计算,结果在±1~2 dB范围内收敛就可接受。另外,比较固体面FW-H和透射面FW-H的结果,看面积分是否捕捉了四极贡献,也是标准验证。
声学后处理和频谱分析
FW-H得到声压时历后,怎样转换成SPL?
声压时历$p'(t)$到频谱的标准步骤:
- 窗函数:应用Hanning或Hamming窗降低频谱泄漏
- FFT:离散Fourier变换得$P(f)$
- PSD(功率谱密度):$S_{pp}(f) = |P(f)|^2 / (\Delta f \cdot T)$
- 转换为SPL:
其中$p_{\mathrm{ref}} = 20 \; \mu\text{Pa}$是空气中的参考声压。总声压级(OASPL)由全频带积分得出:
A特性补正是什么呢? 规制值上常见……。
人耳对不同频率的敏感度不同。低频(100 Hz以下)和高频(10 kHz以上)听觉不敏感,1~4 kHz最敏感。A特性(A-weighting)是模拟人类听觉特性的频率补正滤波,噪声规制用"dBA"(A加权分贝)。FW-H结果转换为dBA后进行评价,这是标准做法。
常见错误和对策
初学者容易踩的坑有哪些?
| 现象 | 原因 | 对策 |
|---|---|---|
| SPL比实验高20 dB以上 | 用了RANS计算(人工变动) | 改用LES/DDES |
| 低频有非物理的峰 | 透射面end-cap问题 | 调整面形状,与固体面结果比较 |
| 高频比实验衰减快 | 网格分辨率不足、数值耗散 | 细化FW-H面附近网格 |
| 数据记录时间太短 | 低频分量无法解析 | 延长记录时间($\Delta f = 1/T$) |
| 结果强烈依赖FW-H面位置 | 面在网格粗化区或涡通过区 | 把面移到CFD高分辨区 |
| 偶极子方向性破坏 | 面上压力采样不足 | 增加面的空间分辨率 |
无人机噪声问题 — FW-H在最前线
城市无人机配送成为现实,最大障碍之一就是"噪声"。小型多旋翼无人机在数千RPM的旋转,叶片通过频率(BPF)及其高次谐波形成刺耳的纯音。各国规制部门定下85 dBA以下目标。多少叶片、螺距如何设、翼型怎样优化,都是通过CFD+FW-H虚拟评估。NASA的ARM(先进空中流动性)项目中,OpenFOAM的LES+FW-H functionObject已成为eVTOL噪声预测的标准工作流。
空力声学分析(FW-H方程式)的软件比较
Ansys Fluent
Fluent的FW-H功能怎样? 设置复杂吗?
Fluent在商用CFD中FW-H实现最成熟。主要特点:
- 从声学模型菜单选"Ffowcs Williams and Hawkings"即可
- 同时支持固体面(Solid)和透射面(Permeable)
- 可设置多个观测点(圆弧排列、网格排列)
- 支持"动态"模式:CFD计算同时执行FW-H积分
- 也支持"离线"模式:保存数据后单独后处理
配置时要注意Source Zone的选择和Export Interval。Export Interval过粗会降低Nyquist频率,高频会折回。
Simcenter STAR-CCM+
STAR-CCM+怎样? 听说它回转机械特别强……。
STAR-CCM+的FW-H实现在旋转机械整合方面特别优秀:
- Sliding Mesh/Overset Mesh与FW-H无缝协作,旋转叶片面自动成为声源面
- 明确区分"FW-H impermeable"(固体面)和"FW-H permeable"(透射面)
- 后处理界面一站式完成SPL频谱、指向性图、A特性补正
- 易于从SPL中分离纯音+宽带成分
GUI配置很完善,FW-H学习成本较低。航空航天和汽车OEM的应用实绩多。
OpenFOAM
OpenFOAM也有FW-H吗? 免费的话很吸引……。
OpenFOAM有noiseModel functionObject形式的FW-H实现。ESI版(.com)和Foundation版(.org)实现略有差异,都采用Farassat 1A方案。
配置示例(在controlDict中添加):
functions
{
noise
{
type noiseModel;
libs ("libfieldFunctionObjects.so");
noiseModel FfowcsWilliamsHawkings;
patchName "fwhSurface";
observers
{
obs1 (0 10 0); // x, y, z [m]
obs2 (10 0 0);
}
rhoRef 1.225;
cRef 340;
writeInterval 1;
}
}需要注意的是,OpenFOAM的FW-H实现验证案例较少,进入实务前一定要用基准问题(NACA0012翼型BPM噪声、SUNY喷流噪声等)验证你的设置合理性。
Actran / Virtual.Lab
专业声学软件也存在吗?
FFT(Free Field Technologies)的Actran和Siemens的Virtual.Lab Acoustics(现Simcenter 3D Acoustics)是声学专业工具。它们除FW-H外还提供更高级的方法(BEM:边界元法、FEM-BEM耦合)。
特别适合处理声散射效应(声波被机身、进气道、排气管反射回折)的问题。例如发动机风扇噪声通过进气、排气管道放射时,FW-H单独不够,需要BEM或FEM与耦合。
| 软件 | FW-H实现 | 透射面 | 回转机械 | 散射效应 | 成本 |
|---|---|---|---|---|---|
| Ansys Fluent | Farassat 1A | 有 | 有 | 无 | 商用 |
| STAR-CCM+ | Farassat 1A | 有 | 优秀 | 无 | 商用 |
| OpenFOAM | Farassat 1A | 部分 | 需配置 | 无 | 免费(GPL) |
| Actran | BEM/FEM耦合 | N/A | 有 | 有 | 商用(高价) |
| Simcenter 3D Acoustics | BEM/FEM | N/A | 有 | 有 | 商用 |
"求解器选择不如上游CFD重要"的业界呼声
空力声学领域资深工程师一致强调:"FW-H求解器的差别没有上游CFD质量的影响大。"同样的FW-H代码,因网格分辨率、湍流模型、时间步长、记录时长的差异,SPL可变化10 dB以上。反过说,若CFD设置妥当,Fluent、STAR-CCM+、OpenFOAM的结果应该相同。与其纠结工具选择,不如投时间做CFD收敛性验证。
空力声学分析(FW-H方程式)的先进研究
宽带噪声模型
LES+FW-H计算成本很高。更廉价的噪声估算方法有吗?
从RANS结果估算噪声级的宽带噪声模型存在,是FW-H之外的思路。用湍流统计量(k, ε, ω等)的半经验式估算SPL。
- Proudman法:等向湍流假设,从$T_{ij}$自相关推估SPL。Fluent已实装
- BPM模型(Brooks-Pope-Marcolini):翼型后缘噪声从边界层参数预测。风机噪声设计的标准
- Amiet理论:湍流入射引起的前缘噪声。风扇转子-定子干渉噪声适用
精度不及LES+FW-H,但设计初期筛选和参数扫描够用。
与机器学习的融合
最近机器学习也用上了吗?
空力声学中ML活用在快速发展:
- 代理模型(Surrogate):用神经网从LES+FW-H结果学习,参数到SPL的瞬时预测。纳入设计优化循环
- PINN(Physics-Informed Neural Network):波动方程物理约束融入神经网的损失函数。数据少时有利
- 超分辨(Super-Resolution):粗LES结果推断细尺度湍流,传给FW-H。计算成本大幅削减
目前多数仍在研究阶段,需规制认证的航空领域还是"用ML验证LES+FW-H的结果"的方式。
UAM·eVTOL的应用
飞行汽车(eVTOL)的噪声问题也用FW-H吗?
UAM(城市空中流动性)正是FW-H解析的"杀手应用"。eVTOL在住宅上空运作,噪声是型式认证的最大障碍。
技术难点:
- 多转子干渉:各转子尾流入射相邻转子,产生叶片-涡相互作用(BVI)噪声。需同时LES所有转子,网格数十亿单元
- 过渡飞行:悬停到巡航的过渡中流场刻变,FW-H面固定配置困难
- 地面反射:起降时地面反射对居民暴露噪声级影响大
NASA的RVLT(革命垂直升力技术)项目已用LES+FW-H进行大规模eVTOL噪声基准验证并公开结果。
空力声学分析(FW-H方程式)的故障排除
虚假声源和数值噪声
FW-H结果上出现非物理的噪声,怎样处理?
虚假声源(spurious noise)在透射面FW-H中最常见。原因和对策:
- 涡穿过面:面内生成的涡从下游"盖子"穿出,面内外声场抵消不完全 → 把面下游端移出喷流、涡放出域,或应用end-cap补正
- 面在粗化网格区:数值耗散让面数据退化,非物理波动混入 → 把面移到网格足够细的区
- 时间步粗:混叠(aliasing)产生虚假高频 → 调整时间步满足采样定理
与实验的SPL不匹配
计算结果和实验SPL对不上……。怎么调试?
SPL偏差的调试流程:
- 先看上游CFD:壁面y+对吗?LES/DDES分辨充分吗?时间平均的Cp、Cd与实验是否吻合? → CFD空气动力学不对,噪声不可能对
- 比较频谱形状:只是电平偏移还是特定频率峰值错位? → 偏移是声源强度问题,峰值错位是流特性(分离点、涡放出频率)偏差
- 检查频率依存性:低频不合?记录时间太短 → 延长。高频衰减?网格分辨不够 → 细化
- 验证麦克风位置:指向性强的源,角度偏1°会差数dB
- 核对实验条件:风洞背景噪声、反射面有无、麦克风频响
End-cap问题
End-cap问题再详细讲讲,怎样对付?
透射面FW-H要求面是闭合的。但若下游闭合,喷流会穿过那个"盖子",面内外声场抵消不净,低频虚假噪声产生。
对策:
- 面不闭合:下游开口,理论上四极捕捉不完整,但低Mach数常可接受 → 许可指标取决于应用
- 时间平均end-cap补正:计算面end-cap处时间平均流量,从积分减去。Fluent、STAR-CCM+已选项化
- 面在喷流外:不求四极完整捕捉,喷流音源用固体面FW-H加载项处理折中案
实务最稳妥是多个面位置计算,验证end-cap影响很小。
有帮助
更详细
错误