固有振動数解析
固有振動数の理論基礎
固有振動数とは
先生、「固有振動数」って何ですか?
構造物が外部からの力なしに振動するときの自然な振動数だ。全ての構造物は固有の振動数を持っており、外力の振動数がこれに一致すると共振が起きる。
共振すると何が問題ですか?
共振では振幅が急激に増大する。橋の崩壊(タコマナローズ橋、1940年)、建物の被害(地震時)、機械の破損(回転体の危険速度)…全て共振が原因だ。固有振動数の把握は構造設計の最も基本的な要件だ。
支配方程式
非減衰自由振動の方程式:
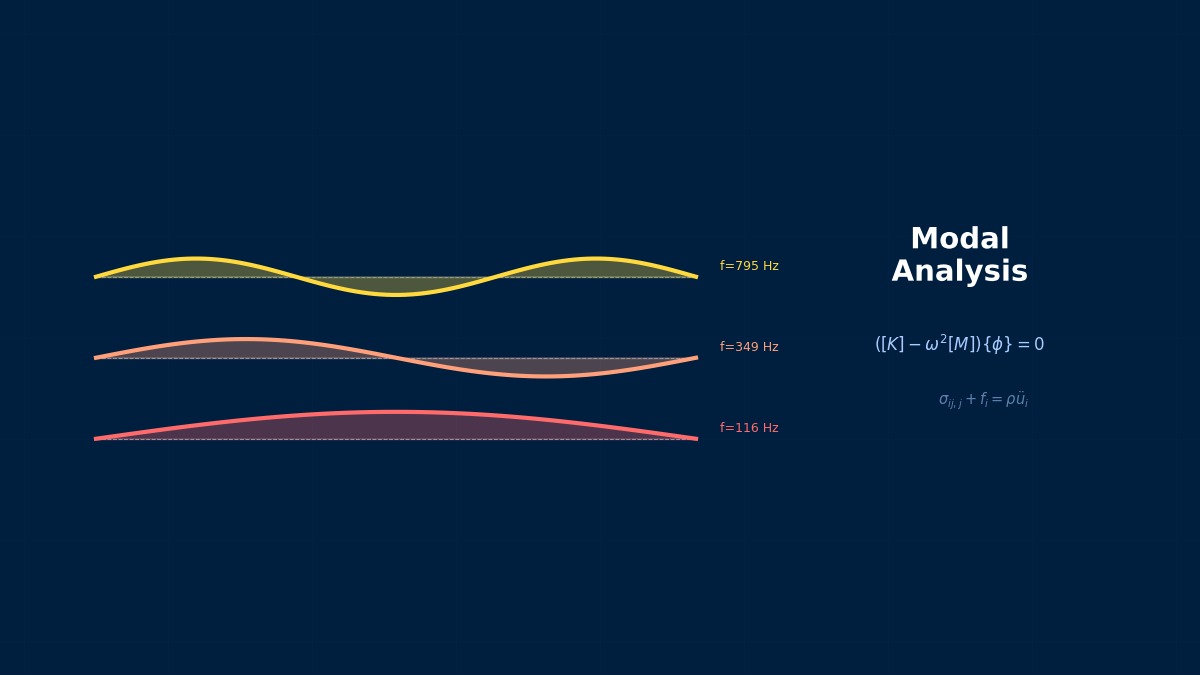
解を $\{u\} = \{\phi\} e^{i\omega t}$ と仮定すると、固有値問題:
座屈解析の $([K] + \lambda [K_\sigma])\{\phi\} = \{0\}$ と同じ形!
まさに同じ数学構造だ。座屈では $[K_\sigma]$ の位置に $[M]$ が入る。だから同じ固有値ソルバー(Lanczos法等)が使える。
$\omega_i$ が角振動数(rad/s)、$f_i = \omega_i / (2\pi)$ が固有振動数(Hz)、$\{\phi_i\}$ がモード形状。
単自由度系の固有振動数
FEMの前に、最も基本的なケース:
ばね定数 $k$ と質量 $m$ だけで決まる。剛性が高いほど、質量が小さいほど振動数が高い。
この単純な関係はFEMの結果をサニティチェックするのに非常に有用だ。構造の等価剛性と等価質量を概算して $f$ の桁を見積もっておく。
梁の固有振動数
基本的な梁の1次固有振動数:
| 条件 | $f_1$ | 備考 |
|---|---|---|
| 片持ち梁 | $\frac{3.516}{2\pi L^2}\sqrt{\frac{EI}{\rho A}}$ | 最も低い |
| 単純梁 | $\frac{\pi^2}{2\pi L^2}\sqrt{\frac{EI}{\rho A}}$ | |
| 両端固定梁 | $\frac{22.37}{2\pi L^2}\sqrt{\frac{EI}{\rho A}}$ | 最も高い |
境界条件で固有振動数がかなり変わりますね。
片持ちと両端固定で6倍以上の差がある。FEMの結果が理論値と大きくずれたら、境界条件の設定を最初に疑うべきだ。
FEMでの固有振動数解析
FEMで固有振動数を求める手順は?
2. 固有値解析の実行 — Lanczos法で下位 $n$ モードを求める
3. 結果の確認 — 固有振動数とモード形状
4. 検証 — 理論解または実験モード解析と比較
材料定数で $\rho$(密度)が必要なのは静解析と違いますね。
そう。静解析では $E$ だけで済むが、固有振動数には $\rho$ が必須。密度の設定を忘れると固有振動数がゼロまたは無限大になる。これは非常に多いミスだ。
まとめ
固有振動数解析の理論を整理します。
要点:
- $([K] - \omega^2 [M])\{\phi\} = \{0\}$ — 座屈と同じ固有値問題
- $f = (1/2\pi)\sqrt{k/m}$ — 全ての基礎。サニティチェックに使う
- 境界条件が固有振動数を大きく変える — 片持ち vs. 両端固定で6倍
- 密度 $\rho$ の設定が必須 — 忘れると結果が無意味
- 共振の回避が設計目標 — 外力の振動数と固有振動数を離す
固有振動数解析は「構造が何Hzで揺れるか」を知るための最も基本的な動的解析ですね。
その通り。全ての動的解析(応答解析、時刻歴解析)の基盤が固有振動数解析だ。これなしに動的設計は成り立たない。
フック則から振動論へ
ロバート・フックは1678年に弾性力と変位の比例関係(Hooke則)を発表したが、彼自身は振動周波数の理論にまで至らなかった。それを完成させたのはChristian Huygensで、単振り子の等時性から固有周期T=2π√(L/g)を1673年に導いた。この式は現在の1自由度振動数公式fn=1/(2π)√(k/m)の特殊形であり、300年以上変わらない基本式だ。
固有振動数の数値計算手法
固有値ソルバー
固有振動数の固有値問題はどうやって解きますか?
座屈解析と同じソルバーが使える。Lanczos法が実務標準。
| 手法 | 特徴 | 用途 |
|---|---|---|
| Lanczos法 | 大規模疎行列に最適。下位モードを効率的に抽出 | 実務標準 |
| サブスペース反復法 | Lanczosより安定だが遅い | 密集固有値 |
| AMLS(Automated Multi-Level Substructuring) | 超大規模問題に対応 | 数百万DOF |
AMLSって何ですか?
AMLSはNastranの大規模固有値解析手法。構造を自動的にサブストラクチャーに分割し、各サブストラクチャーの固有値を個別に求めてから全体を組み立てる。数百万DOFのモデルで数百モードを効率的に求められる。
Nastran
```
SOL 103
CEND
METHOD = 10
BEGIN BULK
EIGRL, 10, , , 20 $ 20モードを求める
```
Abaqus
```
*STEP
*FREQUENCY, EIGENSOLVER=LANCZOS
20, ,
*END STEP
```
Ansys
```
/SOLU
ANTYPE, MODAL
MODOPT, LANB, 20 ! Lanczos法で20モード
SOLVE
```
どのソルバーでもLanczos法がデフォルトですね。
現代のFEMソルバーでは、固有値解析 = Lanczos法と言って良い。設定は「求めるモード数」を指定するだけ。
質量マトリクスの選択
一貫質量と集中質量のどちらを使いますか?
固有振動数の精度は質量マトリクスに依存する:
- 一貫質量(consistent) — 精度が高い。デフォルト推奨
- 集中質量(lumped) — 計算が速いが精度がやや低い。高次モードで差が出る
NastranとAbaqusのデフォルトは一貫質量。
求めるモード数の決め方
何モード求めればいいですか?
用途による:
| 用途 | 必要モード数 |
|---|---|
| 1次固有振動数の確認 | 5〜10 |
| 応答解析(周波数範囲 $f_{max}$ まで) | $f_{max}$ 以下の全モード |
| 有効質量で90%カバー | 全方向で有効質量の合計が総質量の90%以上 |
| NVH解析(自動車) | 300 Hz以下の全モード(数百〜千モード) |
有効質量って何ですか?
各モードが外力(地震等)にどの程度応答するかの指標。有効質量が大きいモードが支配的な応答モード。詳しくは「モード有効質量」のページで解説する。
まとめ
固有振動数解析の数値手法、整理します。
要点:
- Lanczos法が実務標準 — 全ソルバーで対応
- AMLS — 超大規模モデル(数百万DOF)に対応
- 一貫質量マトリクスが精度高い — デフォルト推奨
- モード数の決定 — 有効質量90%カバーが一般的基準
- SOL 103(Nastran), *FREQUENCY(Abaqus), MODAL(Ansys)
固有振動数の最小メッシュ条件
FEM固有振動数解析では評価したい最高次モードの固有振動数に対して十分な空間分解能が必要だ。経験則として「1周期内に最低6〜8節点」が必要で、梁の曲げモードであれば1波長あたり要素12個以上が目安だ。メッシュが粗いと固有振動数が実際より高く算出される(硬化効果)ため、メッシュ収束確認は必須だ。
固有振動数の実務適用
固有振動数解析の実務
固有振動数解析は実務でどう使われていますか?
ほぼ全ての構造設計で使われている。
| 分野 | 目的 | 基準 |
|---|---|---|
| 建築 | 地震応答の予測 | 建築基準法 |
| 橋梁 | 風・地震の共振回避 | 道路橋示方書 |
| 自動車 | NVH(振動騒音)評価 | 社内基準 |
| 航空宇宙 | フラッター速度の評価 | FAR/CS 25 |
| 回転機械 | 危険速度の回避 | API 617等 |
| 配管 | 振動疲労の防止 | ASME B31.1/3 |
共振の回避
共振を回避するにはどうしますか?
外力の振動数から固有振動数を離すのが基本:
$f_n$ が外力の ±30%の範囲外にあれば共振を回避できる(減衰が十分な場合)。
±30%のマージンは十分ですか?
低減衰の構造(鋼構造: $\zeta \approx 1\%$)では±30%で十分。高減衰(ゴムマウント: $\zeta \approx 10\%$)ならもっと狭いマージンで済む。
モード形状の解釈
モード形状は何を意味しますか?
モード形状は「その振動数で構造がどう変形するか」を示す。
確認ポイント:
- 1次モード — 全体的な変形(全体曲げ、全体ねじり)
- 高次モード — 局所的な変形(パネルの振動、フランジの振動)
- 剛体モード — 自由境界で6つの剛体モード($f = 0$)
自由境界で $f = 0$ のモードが出るのは正常ですか?
正常。自由浮遊の構造は剛体で移動・回転できるから、対応する固有振動数はゼロ。6つの剛体モード(3並進+3回転)が出て、7番目から弾性モードが始まる。
実務チェックリスト
固有振動数解析のチェックリストをお願いします。
「材料密度が正しいか」が最初のチェック。これを忘れると全てが無意味。
密度は静解析では自重にしか影響しないから忘れがちだが、固有振動数では$\omega \propto 1/\sqrt{\rho}$ で直接効く。密度を10倍間違えると振動数が $\sqrt{10} \approx 3.2$ 倍ずれる。
回転機械の臨界速度と共振回避設計
タービンポンプの回転数1500rpm(25Hz)の運転では、羽根の通過周波数(ブレードパッシング周波数)が構造固有振動数と一致しないよう設計する。Weir社の給水ポンプ設計では羽根枚数7枚なら175Hz(7×25Hz)を回避するため、ケーシング固有振動数は150Hz以下または200Hz以上に設定する。この周波数マージン±20%の確保が実務設計の鉄則だ。
固有振動数のソフトウェア比較
固有振動数解析のツール
固有振動数解析に使えるツールを教えてください。
全ての汎用FEMソルバーで対応している。差が出るのは大規模問題の性能と動的解析との連携だ。
| 機能 | Nastran | Abaqus | Ansys |
|---|---|---|---|
| Lanczos法 | EIGRL | *FREQUENCY, LANCZOS | MODOPT, LANB |
| AMLS | ○(SOL 103) | — | — |
| GPU加速 | — | — | ○(Sparse Direct) |
| NVH対応 | SOL 103 + SOL 111 | FREQUENCY + SSD | Modal + Harmonic |
| フラッター | SOL 145 | — | Mechanical APDL |
NastranのAMLSが大規模問題に強いんですね。
自動車のBIW(ボディ)モデルは数百万DOFで数百モードが必要。NastranのAMLSはこのスケールで最も実績がある。
実験モード解析ツール
固有振動数は実験(モード解析)でも測定できる:
| ツール | 特徴 |
|---|---|
| LMS Test.Lab(Siemens) | 実験モード解析の標準。FEMとの相関(MAC) |
| ME'scope | モード解析の可視化 |
| OROS | 振動測定+モード解析 |
| Simcenter Testlab | 旧LMS。NX Nastranとの統合 |
選定ガイド
固有振動数解析はどのソルバーでも基本機能だから、ソルバーの差は少ないですね。
そう。差が出るのは「数百万DOFで数百モード」という大規模問題と、「応答解析との連携」だ。
LMS Test.Lab固有振動数実験同定
Siemens LMS Test.Lab(現Simcenter Testlab)はインパルスハンマ試験や制振試験からFRFを取得し、多自由度曲線適合(MDOF curve fitting)で固有振動数・減衰比・モード形状を同定する業界標準ツールだ。Volvo社は全車種の設計FEMとTest.Lab実験結果を自動相関させるシステムを2000年代初頭に構築し、モデル修正の工数を80%削減した。
固有振動数の先端研究
固有振動数解析の先端研究
固有振動数解析の最前線を教えてください。
モデル更新(Model Updating)
確率論的固有振動数
材料特性や幾何学形状のばらつきを確率変数として扱い、固有振動数の分布を求める。モンテカルロシミュレーション or PCE(Polynomial Chaos Expansion)で効率的に計算。
トポロジー最適化と固有振動数
固有振動数を制約条件に含むトポロジー最適化。「1次固有振動数を指定値以上に保ちつつ質量を最小化」。固有値の感度計算が数学的に厄介(固有値のクラスタリング、モードスイッチング)。
デジタルツインと振動モニタリング
構造のデジタルツインで固有振動数をリアルタイム監視。固有振動数の変化から損傷の検知(Structural Health Monitoring)。振動数が低下したら剛性低下=損傷の兆候。
まとめ
固有振動数解析の先端研究、まとめます。
固有振動数は構造の「脈拍」だ。健全な構造は安定した振動数を持ち、損傷は振動数の変化として現れる。
熱応力による固有振動数シフト
構造物の温度が変化すると熱ひずみによるプレストレスが生じ、固有振動数が変化する。圧縮プレストレスは固有振動数を低下させ(座屈に近づく)、引張プレストレスは上昇させる。NASAのX-43Aスクラムジェット実験機では空力加熱によりパネル固有振動数が飛行中に15〜25%変化することをプレストレスモーダル解析で予測し、フラッター回避の根拠とした。
固有振動数のトラブル対応
固有振動数解析のトラブル
固有振動数解析でよくあるトラブルを教えてください。
固有振動数のトラブルは入力データの間違いがほとんどだ。
固有振動数がゼロ
固有振動数が0 Hzのモードが出ます(拘束しているのに)。
剛体モードが残っている。拘束が不足して構造が動ける方向がある。
確認:
- 6自由度全てが拘束されているか(並進3+回転3)
- RBE2のスレーブDOFが正しいか
- メカニズム(不安定な構造)がないか
自由境界解析($f = 0$ のモードを含む)をするつもりだったのに、ゼロモードが7個以上出るのは?
メカニズムがある。構造の一部が結合されていない(接続忘れ)。モード形状を見れば、どの部分が分離しているかわかる。
固有振動数が理論値と大きくずれる
確認項目(優先度順):
1. 密度 $\rho$ — 設定忘れ or 単位ミス。$f \propto 1/\sqrt{\rho}$
2. ヤング率 $E$ — 単位ミス(MPa vs. Pa)。$f \propto \sqrt{E}$
3. 境界条件 — ピン/固定/自由の間違い
4. 質量の二重計上 — 密度+集中質量の重複
5. 断面諸元 — 梁の $I$ やシェルの板厚が間違い
密度とヤング率の両方が $f$ に効くんですね。
$f \propto \sqrt{E/\rho}$。密度を10倍間違えると $f$ が $1/\sqrt{10} \approx 0.32$ 倍。ヤング率を1000倍間違え(MPa→Pa)ると $f$ が $\sqrt{1000} \approx 32$ 倍。どちらも桁違いのずれになる。
モードが期待と違う
1次モードが全体曲げではなく局所モードです。
薄いパネルや軽い付属物が全体モードより低い振動数で振動することがある。FEMでは「低い順にモードを出す」ため、局所モードが先に出ると全体モードが後回しになる。
対策:
- モード数を増やして全体モードを探す
- 局所モードの原因(薄いパネル、軽い部品)を特定
- 必要に応じてモデルを簡略化(局所モードの原因を除去)
固有振動数が実験と合わない
FEMと実験で10%以上の差があります。
FEMと実験の5〜10%の差は一般的。10%以上の差がある場合:
- FEMの境界条件が実験と異なる — 実験の支持条件がピンでも固定でもない中間状態
- FEMの質量が不正確 — 非構造質量(配線、塗装、付帯物)の見落とし
- FEMの剛性が不正確 — 接合部の剛性(RBE2→RBE3で変わる)
- 減衰の影響 — 高減衰では固有振動数がずれる($f_d = f_n \sqrt{1-\zeta^2}$)
まとめ
固有振動数解析のトラブル対処、整理します。
「密度の設定確認」が固有振動数解析の第一歩。これだけは忘れません。
密度の設定忘れは固有振動数解析の最も多いミスだ。静解析から動的解析に移行するとき、密度の入力を確認する習慣をつけよう。
計算固有振動数と実測の乖離が大きい場合
FEM固有振動数と実測値が10%以上ずれる場合、境界条件の不一致が最も多い原因だ。「固定端」として設定したボルト締結部が実際には半剛体(ばね支持)になっていることがある。実験値に合わせるにはボルト締結部の接触剛性をパラメータとして感度解析し、最も実測と合う値を特定するモデル更新(Model Updating)が有効だ。
関連トピック
なった
詳しく
報告